
قابلیت اطمینان یک سیستم کنترل
پرگاران
قابلیت اطمینان یک سیستم کنترل :
قابلیت اطمینان (R) احتمالی است که یک جزء یا سیستم همانطور که طراحی شده است عمل کند. مانند همه ارقام احتمال، قابلیت اطمینان از ۰ تا ۱ شامل محدوده است.
قابلیت اطمینان یک سیستم کنترل
 ایمنی
ایمنی
با توجه به تمایل دستگاه های تولید شده به شکست در طول زمان، قابلیت اطمینان با گذشت زمان کاهش می یابد. در طول عمر مفید یک جزء یا سیستم، قابلیت اطمینان با یک تابع نمایی ساده به میزان خرابی مرتبط است:
R = e−λt
کجا،
R = قابلیت اطمینان به عنوان تابعی از زمان (گاهی اوقات به صورت R(t) نشان داده می شود)
e = ثابت اویلر (≈ ۲٫۷۱۸۲۸)
λ = نرخ شکست (فرض می شود در طول دوره عمر مفید ثابت باشد)
t = زمان
با دانستن اینکه نرخ شکست معادل ریاضی میانگین زمان بین خرابی ها (MTBF) است، ممکن است این معادله را بر حسب MTBF به عنوان “ثابت زمانی” (τ ) دوباره بنویسیم. برای خرابی های تصادفی در طول دوره عمر مفید:
R = e−t/MTBF یا R = e−t/λ
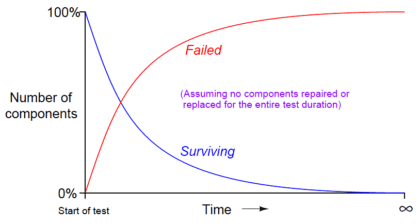
این تابع نمایی معکوس به صورت ریاضی سناریویی را که قبلاً توضیح داده شد را توضیح می دهد که در آن دسته بزرگی از مؤلفه ها را آزمایش کردیم و تعداد مؤلفه های خراب و تعداد مؤلفه های باقی مانده را در طول زمان می شمردیم.
مانند آزمایش تاس که در آن هر قالب “شکست خورده” را کنار می گذاریم و سپس فقط “بازمانده ها” باقی مانده را برای آزمایش بعدی در آزمون می فرستیم، در نهایت با یک عدد رو به کاهش مواجه می شویم. از “بازمانده ها” همانطور که آزمایش ادامه دارد.
همان تابع نمایی برای محاسبه قابلیت اطمینان برای اجزای منفرد نیز اعمال می شود. تصور کنید یک جزء منفرد در طول دوره عمر مفید خود کار می کند و فقط در معرض خرابی های تصادفی است.
هر چه مدت زمان بیشتری بر این مؤلفه تکیه شود، زمان بیشتری برای تسلیم شدن در برابر خطاهای تصادفی خواهد داشت و بنابراین احتمال عملکرد کامل آن در طول مدت آزمایش کمتر است. /p>
برای نشان دادن مثال، یک فرستنده فشار نصب شده و استفاده شده برای یک دوره ۱ ساله، نسبت به فرستنده فشار یکسانی که به مدت ۵ سال در خدمت است، شانس بیشتری برای کارکرد کامل در آن زمان دارد، صرفاً به این دلیل که فرستنده ای که ۵ سال کار می کند پنج برابر فرصت بیشتر برای شکست به عبارت دیگر، قابلیت اطمینان یک جزء در یک زمان مشخص تابعی از زمان است و نه فقط میزان خرابی (λ).
با استفاده از تاس یک بار دیگر برای نشان دادن، به این صورت است که ما یک قالب شش وجهی را بارها و بارها پرتاب کرده ایم و منتظر می مانیم تا “از کار بیفتد” (یک “۱” بیاندازید) . هر چه تعداد دفعات بیشتری این قالب تکی را بچرخانیم، احتمال اینکه در نهایت “شکست” پیدا کند بیشتر می شود (در نهایت “۱” را می زنیم). با هر رول، احتمال شکست ۱/۶ و احتمال بقا ۵/۶ است.
از آنجایی که بقا در چند رول مستلزم زنده ماندن در رول اول و و رول بعدی و رول بعدی، تا آخرین رول باقی مانده است، تابع احتمالی که باید در اینجا اعمال کنیم این است “AND” (ضرب) احتمال بقا.
بنابراین، احتمال بقا بعد از یک رول ۵/۶ است، در حالی که احتمال بقا برای دو رول متوالی (۵/۶)۲ است، احتمال بقا برای سه رول متوالی (۵/۶)۳ و غیره است.
جدول زیر احتمال “شکست” و “بقا” را برای این قالب با افزایش تعداد رول ها نشان می دهد:

یک مثال عملی از این معادله در حال استفاده، محاسبه قابلیت اطمینان برای یک Rosemount مدل ۱۱۵۱ (با مقدار MTBF نشان داده شده ۲۲۶ سال که توسط Rosemount منتشر شده است) در طول عمر مفید ۵ سال پس از سوختن:
R = e−۵/۲۲۶
R = 0.9781 = 97.81%
روش دیگری برای تفسیر این مقدار قابلیت اطمینان، در قالب دسته بزرگی از فرستنده ها. اگر سیصد فرستنده Rosemount مدل ۱۱۵۱ به طور مداوم به مدت پنج سال پس از سوختن (با فرض عدم تعویض واحدهای خراب) استفاده میشد، انتظار میرود که تقریباً ۲۹۳ فرستنده از آنها همچنان در طول این پنج سال کار کنند (یعنی ۶٫۵۶۴ خرابی با دلایل تصادفی) دوره:

لازم به ذکر است که اگر جایگزینی فوری فرستنده های خراب را فرض کنیم (با حفظ تعداد کل واحدهای عملکرد در ۳۰۰) محاسبه به جای نمایی معکوس خطی خواهد بود. p>
اگر اینطور باشد، تعداد خرابی های تصادفی به سادگی ۱/۲۲۶ در سال یا ۰٫۰۲۲۱۲ در هر فرستنده در یک دوره ۵ ساله است. برای مجموعه ای از ۳۰۰ فرستنده Rosemount مدل ۱۱۵۱ (نگهداری)، این معادل ۶٫۶۳۷ واحد شکست خورده در طول مدت آزمایش ۵ ساله است:
تعداد فرستنده های ناموفق = (۳۰۰) (۵/۲۲۶) = ۶٫۶۳۷
مقالاتی که ممکن است دوست داشته باشید:
استاندارد IEC 61511
محاسبه نرخ شکست
سیستم مدیریت مشعل
سوئیچ لغو تعمیر و نگهداری
تحلیل لایههای حفاظت
در صورت هرگونه سوال و نظر با مجموعه پرگاران تماس حاصل فرمایید.
جهت کسب اطلاعات بیشتر اینجا کلیک کنید.
مطالب مرتبط
میزان خرابی و MTBF سیستمهای ابزار دقیق ایمنی
میزان خرابی و MTBF سیستمهای ابزار دقیق ایمنی :
در مهندسی قابلیت اطمینان، مهم است که بتوانیم ...
پرگاران

سیستم مدیریت مشعل ابزاری ایمنی
سیستم مدیریت مشعل ابزاری ایمنی
یک نمونه "کلاسیک" از خودکار صنعتی سیستم خاموش کردن یک سیستم مدیریت مشعل ...
پرگاران
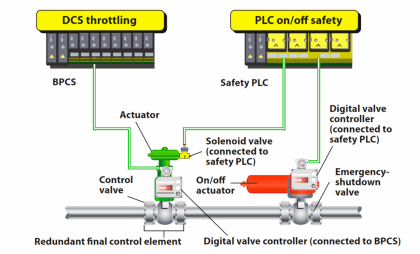
سیستم کنترل BPCS و سیستم ایمنی ESD Delta-V DCS
سیستم کنترل BPCS و سیستم ایمنی ESD Delta-V DCS چیست؟
سیستم Emerson DCS اکنون یک سیستم شناخته ...