
مفهوم افزونگی در سیستم های کنترلی
پرگاران
مفهوم افزونگی در سیستم های کنترلی چیست؟
میانگین زمان بین خرابی ها (MTBF) هر سیستمی که به اجزای حیاتی خاصی وابسته است، ممکن است با کپی کردن آن مؤلفه ها به صورت موازی، افزایش یابد، به طوری که خرابی تنها یکی از آنها این کار را انجام ندهد. سیستم را به عنوان یک کل به خطر بیاندازد. به این زیادی می گویند.
یک مثال رایج از افزونگی اجزا در سیستمهای ابزار دقیق و کنترل، افزونگی ارائه شده توسط سیستم های کنترل توزیع شده (DCS)، که در آن پردازنده ها، کابل های شبکه و حتی کانال های I/O (ورودی/خروجی) ممکن است مجهز به «استاندبای داغ” تکراری آماده در صورت خرابی مؤلفه اصلی، عملکرد را فرض کنید.
افزونگی تمایل به افزایش MTBF یک سیستم دارد بدون اینکه لزوما عمر سرویس آن را افزایش دهد. برای مثال، یک DCS، مجهز به ماژولهای کنترل ریزپردازنده اضافی در رک خود، MTBF بیشتری نشان میدهد، زیرا یک خطای تصادفی ریزپردازنده با وجود ماژول ریزپردازنده یدکی («استاندبای داغ») پوشش داده میشود.
اما، با توجه به این واقعیت که هر دو ریزپردازنده به طور مداوم انرژی میگیرند، و بنابراین تمایل به سایش با سرعت یکسان دارند، عمر عملیاتی آنها افزایشی نخواهد بود. به عبارت دیگر، دو ریزپردازنده قبل از فرسودگی دو برابر بیشتر از یک ریزپردازنده کار نخواهند کرد.
توسعه MTBF ناشی از افزونگی تنها در صورتی صادق است که خرابی های تصادفی واقعاً رویدادهای مستقل باشند – یعنی با یک علت مشترک مرتبط نباشند.
برای استفاده از مثال DCS با ماژولهای کنترل ریزپردازنده اضافی، حساسیت آن رک به خطای تصادفی ریزپردازنده تنها در صورتی کاهش مییابد که خطاهای مورد نظر به یکدیگر مرتبط نباشند و این دو را تحت تأثیر قرار دهد. ریزپردازنده ها به طور جداگانه.
ممکن است مکانیسمهای خطای مشترکی وجود داشته باشد که بتواند هر دو ماژول ریزپردازنده را به راحتی غیرفعال کند که میتواند یکی را غیرفعال کند، در این صورت این افزونگی هیچ ارزشی اضافه نمیکند.
نمونههایی از این خطاهای معمولی عبارتند از نوسانات برق (زیرا یک نوسان به اندازه کافی قوی برای از بین بردن یک ماژول به طور همزمان دیگری را از بین میبرد) و عفونت ویروس کامپیوتری (زیرا ویروسی که بتواند به یکی از آنها حمله کند، می تواند به همین راحتی و در همان زمان به دیگری حمله کند.
افزونگی در سیستم های کنترل
یک مثال ساده از افزونگی قطعات در یک سیستم ابزار دقیق صنعتی، منبع تغذیه دوگانه DC است که از طریق یک ماژول دیود تغذیه می شود.
عکس زیر یک نمونه معمولی را نشان می دهد، در این مورد یک جفت Allen-Bradley منابع تغذیه AC-to-DC برای شبکه دیجیتال DeviceNet:

اگر یکی از دو منبع تغذیه AC-to-DC با ولتاژ خروجی کم از کار بیفتد، منبع تغذیه دیگر می تواند بار را با عبور دادن برق خود از طریق برق حمل کند. ماژول افزونگی دیود:
کلاس

این ماژول افزونگی مقدار MTBF خاص خود را دارد، بنابراین با گنجاندن آن در سیستم، یک مؤلفه دیگر را اضافه می کنیم که ممکن است خراب شود.
با این حال، نرخ MTBF یک شبکه دیودی ساده بسیار بیشتر از یک منبع تغذیه AC به DC است، و بنابراین با استفاده از این، خود را در سطح بالاتری از قابلیت اطمینان مییابیم. ماژول افزونگی دیود نسبت به زمانی که نداشتیم (و فقط یک منبع تغذیه داشتیم).
برای اینکه مؤلفه های اضافی واقعاً MTBF سیستم را افزایش دهند، باید احتمال خرابی های ناشی از علل رایج بررسی شود. به عنوان مثال، اثرات تغذیه منبع تغذیه اضافی AC به DC از همان خط AC را در نظر بگیرید.
منابع تغذیه اضافی قابلیت اطمینان سیستم را در مواجهه با خرابی تصادفی منبع تغذیه افزایش میدهد، اما این افزونگی هیچ کمکی به بهبود قابلیت اطمینان سیستم در سیستم نمیکند. رویداد از کار افتادن خط برق مشترک AC! برای اینکه در این مثال از حداکثر مزیت افزونگی بهره مند شویم، باید هر منبع تغذیه AC به DC را از یک خط متناوب (غیر مرتبط) AC تهیه کنیم.
یک مثال دیگر از افزونگی در ابزارسازی صنعتی استفاده از چندین فرستنده برای حس کردن یک متغیر فرآیند است، با این تصور که متغیر فرآیند بحرانی همچنان ادامه خواهد داشت. حتی در صورت خرابی فرستنده نظارت شود. بنابراین، نصب فرستندههای اضافی باید MTBF توانایی سنجش سیستم را افزایش دهد.
در اینجا مجدداً باید به خرابیهای ناشی از علل مشترک بپردازیم تا از مزایای کامل افزونگی بهره ببریم. اگر سه فرستنده سطح مایع برای اندازه گیری سطح مایع دقیقاً یکسان نصب شده باشد، سیگنال های ترکیبی آنها نشان دهنده افزایش سیستم اندازه گیری MTBF فقط برای خطاهای مستقل است.
یک مکانیسم خرابی مشترک برای هر سه فرستنده، سیستم را به همان اندازه یک فرستنده منفرد در برابر خرابی تصادفی آسیب پذیر می کند. برای دستیابی به MTBF بهینه در آرایههای حسگر اضافی، حسگرها باید از خطاهای رایج مصون باشند.
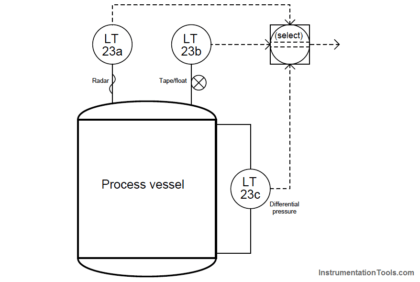
سیستم رأی گیری فرستنده سطح
در این مثال، سه نوع مختلف فرستنده سطح سطح مایع داخل یک کشتی را نظارت می کند، سیگنال های آنها توسط عملکرد انتخابگر برنامه ریزی شده در داخل یک DCS پردازش می شود:

در اینجا، فرستنده سطح ۲۳a یک رادار موج هدایت شونده (GWR)، فرستنده سطح ۲۳b یک نوار و شناور است، و فرستنده سطح ۲۳c یک سنسور فشار تفاضلی است. هر سه فرستنده سطح با استفاده از فناوریهای مختلف سطح مایع را حس میکنند که هر کدام نقاط قوت و ضعف خاص خود را دارند.
از این طریق افزونگی بهتری در اندازه گیری به دست می آید، زیرا هیچ شرایط فرآیند یا رویداد تصادفی دیگری به احتمال زیاد بیش از یکی از فرستنده ها را در هر زمان معین خراب نمی کند.
به عنوان مثال، اگر چگالی مایع فرآیند به طور ناگهانی تغییر کند، بر دقت اندازه گیری فرستنده فشار دیفرانسیل (LT-23c) تأثیر می گذارد، اما بر فرستنده رادار و نه فرستنده نوار و شناور.
اگر چگالی بخار فرآیند به طور ناگهانی تغییر کند، ممکن است بر فرستنده رادار تأثیر بگذارد (زیرا چگالی بخار معمولاً بر ثابت دی الکتریک و ثابت دی الکتریک تأثیر می گذارد سرعت انتشار امواج الکترومغناطیسی، که به نوبه خود بر زمان صرف شده برای برخورد پالس رادار به سطح مایع و بازگشت آن تأثیر میگذارد.
تلاطم سطحی مایع داخل ظرف ممکن است به شدت بر توانایی فرستنده شناور برای تشخیص دقیق سطح مایع تأثیر بگذارد، اما تأثیر کمی بر خوانش فرستنده فشار دیفرانسیل و اندازه گیری فرستنده رادار (با فرض فرستنده رادار) در چاهی خاموش پوشانده شده است.
اگر تابع انتخابگر اندازه گیری میانه (وسط) یا میانگین بهترین ۲-out-of-3 (“2oo3”)، هیچ یک از این رخدادهای تصادفی فرآیند بر روی انتخاب شده تأثیر زیادی نخواهد داشت. اندازه گیری سطح مایع در داخل ظرف.
افزایش واقعی در اینجا به دست می آید زیرا فرستنده های سه سطح نه تنها احتمال خرابی (همه) به طور همزمان کمتر است. برای هر فرستنده ای که از کار بیفتد، بلکه به این دلیل که سطح به سه روش کاملاً متفاوت حس می شود.
یک نیاز اساسی برای اثربخشی افزونگی این است که همه مولفههای زائد باید دقیقاً عملکرد فرآیندی یکسانی داشته باشند. در مورد اجزای اضافی DCS مانند پردازندهها، I/O کارتها و کابلهای شبکه، هر یک از این مؤلفههای زائد نباید کاری بیش از ارائه «پشتیبان» برای همتایان اصلی خود انجام دهند.
اگر یک گره DCS خاص مجهز به دو پردازنده بود – یکی به عنوان اصلی و دیگری به عنوان ثانویه (پشتیبان) – اما پردازنده پشتیبان این دو پردازنده که با برخی از جزئیات خاص آن و نه پردازنده اصلی (یا برعکس) وظیفه دارند، واقعاً برای یکدیگر اضافی نیستند.
اگر یکی از پردازنده ها از کار بیفتد، دیگری دقیقاً همان عملکرد را انجام نمی دهد و بنابراین عملکرد سیستم (حتی به مقدار کمی) توسط پردازنده تحت تأثیر قرار می گیرد. شکست.
به همین ترتیب، حسگرهای اضافی باید دقیقاً همان عملکرد اندازه گیری فرآیند را انجام دهند تا واقعاً زائد باشند. یک فرآیند مجهز به فرستندههای اندازهگیری سهگانه مانند مثال قبلی که سطح مایع یک کشتی توسط رادار موج هدایتشونده، نوار و شناور و فشار دیفرانسیل، اگر و تنها در صورتی که هر سه فرستنده سطح مایع دقیقاً یکسان را حس کنند، از حفاظت از افزونگی برخوردار خواهند شد. دقیقا همان محدوده کالیبره شده.
این اغلب یک چالش را در یافتن مکانهای مناسب در ظرف فرآیند برای سه ابزار مختلف نشان میدهد تا متغیر فرآیند دقیقاً یکسان را حس کنند.
اغلب، اتصالات لولهای که در ظرف نفوذ میکنند (اغلب نازل نامیده میشوند) برای پذیرش چندین ابزار در نقاط لازم برای اطمینان از ثبات اندازهگیری بین آنها قرار ندارند. این اغلب زمانی اتفاق میافتد که یک مخزن فرآیند موجود با فرستندههای فرآیند اضافی مجهز شود.
ساخت و ساز جدید معمولاً مشکل کمتری دارد، زیرا نازل های لازم و سایر لوازم جانبی ممکن است در موقعیت مناسب خود در مرحله طراحی قرار گیرند.
اگر شرایط جریان سیال در یک مخزن فرآیند بیش از حد متلاطم باشد، سنسورهای متعددی که برای اندازهگیری یک متغیر نصب شدهاند، گاهی تفاوتهای قابل توجهی را گزارش میکنند.
برای مثال
چند فرستنده دما که در مجاورت یکدیگر در یک ستون تقطیر قرار دارند، ممکن است تفاوت قابل توجه دما را گزارش کنند اگر عناصر حسگر مربوطه ( ترموکوپل، RTDs) با مایع یا بخار فرآیند در نقاطی که الگوهای جریان متفاوت است تماس بگیرید.
چند سنسور سطح مایع، حتی با فناوری یکسان، ممکن است در صورت چرخش یا “قیف” مایع داخل ظرف هنگام ورود و خروج از ظرف، تفاوت در سطح مایع را گزارش کنند.
نه تنها تفاوت های قابل توجه اندازه گیری بین فرستنده های اضافی توانایی آنها را برای عملکرد به عنوان دستگاه “پشتیبان” در صورت خرابی به خطر می اندازد، بلکه چنین تفاوت هایی ممکن است همچنین در واقع یک سیستم اضافی را “احمق” می کند و فکر می کند که یک یا چند فرستنده قبلاً شکست خورده است، در نتیجه باعث می شود اندازه گیری انحرافی نادیده گرفته شود.
برای استفاده مجدد از آرایه سنجش سطح سه تکراری به عنوان مثال، فرض کنید فرستنده سطح مبتنی بر رادار به دلیل تأثیرات چرخش مایع در داخل ظرف.
اگر تابع انتخابگر طوری برنامه ریزی شده باشد که چنین اندازه گیری های انحرافی را نادیده بگیرد، سیستم به جای آرایه سه گانه، به یک آرایه تکراری-زائد تنزل می یابد.
برای مثال، در صورت کاهش خطرناک سطح مایع، فقط مبتنی بر رادار و مبتنی بر شناور آماده هستند تا این وضعیت خطرناک فرآیند را به سیستم کنترل سیگنال دهند، زیرا فرستنده سطح مبتنی بر فشار در حال ثبت بسیار زیاد است.
مقالاتی که ممکن است دوست داشته باشید:
فرستنده های ۴ سیم
طراحی ابزارهای سطح
فلسفه حلقه ایمن
سوالات مصاحبه LOPA
قابلیت اطمینان سیستم کنترل
در صورت هرگونه سوال و نظر با مجموعه پرگاران تماس حاصل فرمایید.
جهت کسب اطلاعات بیشتر اینجا کلیک کنید.
مطالب مرتبط

خرابی های SIS و قابلیت اطمینان – سیستم های ابزار دقیق ایمنی
خرابی های SIS چیست؟
درک انواع خرابیها در سیستمهای ابزاردار ایمنی (SIS) و روشهای بهبود قابلیت اطمینان ...
پرگاران
قابلیت اطمینان یک سیستم کنترل
قابلیت اطمینان یک سیستم کنترل :
قابلیت اطمینان (R) احتمالی است که یک جزء یا سیستم همانطور ...
پرگاران
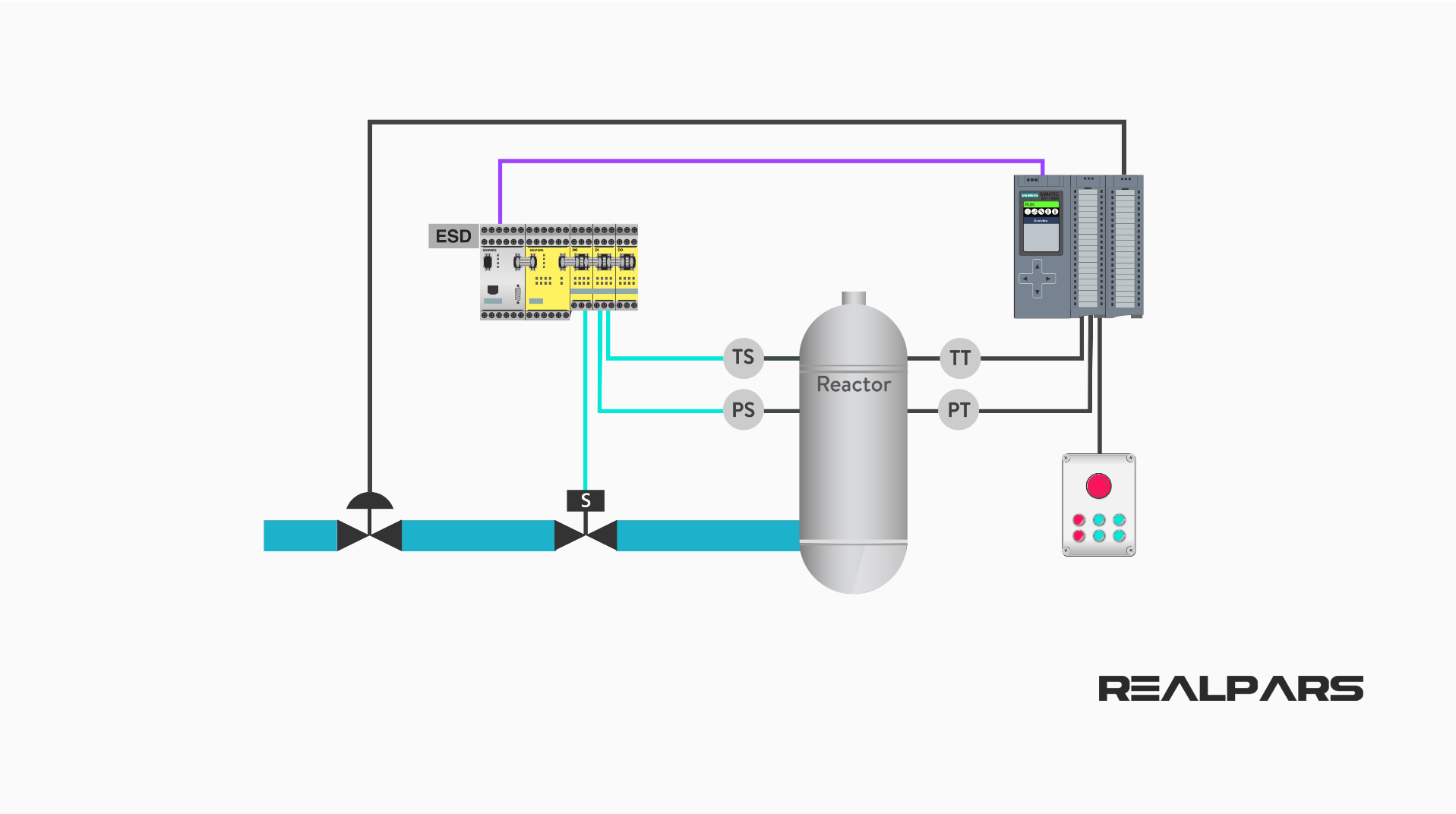
سیستم خاموش کردن اضطراری چیست؟
خاموسیستم خاموش کردن اضطراری چگونه عمل میکند ؟ بیایید به بررسی این موضوع بپردازیم
نحوه عملکرد سیستم خاموش ...