ملاحظات انتخاب انکودر مناسب
انتخاب یک انکودر مستلزم درک شرایط محیطی برنامه و سطوح عملکرد مطلوب است.
در زیر برخی از ملاحظات انتخابی وجود دارد که باید هنگام تصمیم گیری در مورد منبع یابی محصول رمزگذار بررسی شوند.
چه نوع حرکتی نظارت می شود – خطی یا چرخشی؟
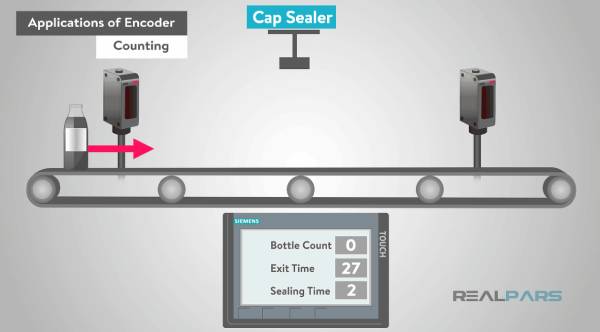
چه پارامترهایی اندازه گیری می شوند – موقعیت، سرعت حرکت؟
آیا ضبط جهت مهم است؟ – این کمک می کند تا مشخص شود که آیا یک انکودر تک کانالی کافی است یا اینکه آیا به یک رمزگذار چند کاناله نیاز است یا خیر.
شرایط محیطی خاصی که انکودر در معرض آن قرار می گیرد چیست؟ – این به تعیین مناسب ترین فناوری سنجش برای انکودر کمک می کند.
این شامل قرار گرفتن در معرض احتمالی با:
- گرد و خاک
- مرطوب
- مواد شیمیایی سوزاننده یا خورنده
- شوکه شدن
- لرزش
- افراط در دما
آیا برنامه مورد نظر می تواند در صورت قطع برق، یک خانه مجدد داشته باشد؟
این به ایجاد نیاز به انکودرهای افزایشی در مقابل مطلق کمک می کند.
چه مقدار وضوح برای اندازه گیری مورد نیاز است؟
الزامات الکتریکی برای سیستم چیست؟ – این شامل در نظر گرفتن رابط خروجی مانند رابط های نقطه به نقطه، رابط های فیلدباس یا رابط های اترنت است.
چه بسته بندی و طراحی مکانیکی برای برنامه مناسب است؟
برای محرکهای دوار، این شامل تصمیمگیری در مورد رمزگذار شفت در مقابل سوراخ، نوع مکانیسم قفل، اندازه سوراخ، و اینکه بستهبندی رمزگذار مهر و موم شده یا در معرض بهتر است، میشود.






دیدگاهتان را بنویسید