
کنترلر PID چیست؟
پرگاران
کنترلر پی آی دی یا کنترلر PID:
کنترل کننده های PID امروزه به طور گسترده در صنایع استفاده می شود. اگرچه توابع کنترل کننده PID داخلی در PLC وجود دارد، این عملکرد در بسیاری از برنامه ها استفاده می شود. تقریباً ۹۵٪ از فرآیند حلقه بسته در بخش اتوماسیون صنعتی از این نوع کنترلر استفاده می کند.
PID مخفف کلمات Proportional (تناسبی)، Integral (انتگرال گیر)، Derivative (مشتق گیر) است.
این سه کنترلر به گونه ای ترکیب شده اند که می توانند فرآیند را طبق مقدار تعریف شده توسط کاربر کنترل کنند.
بیایید مثالی بزنیم تا عملکرد کنترلر PID را بهتر درک کنیم
کنترلر پی آی دی

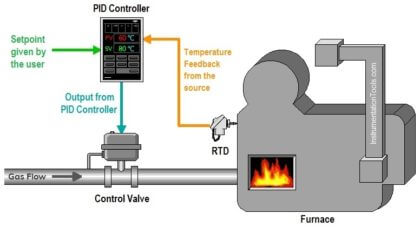
این نمونه کوچکی از فرآیند کنترل دما با استفاده از کنترلر PID است. ما اینجا یک کوره داریم و می خواهیم دمای کوره را کنترل کنیم. به همین دلیل است که باید مقداری از دما را که میخواهیم حفظ کنیم، بدهیم و این مقدار دما مقدار دلخواه یا مقدار تنظیم نامیده میشود.
دمای کوره ای که در اینجا از طریق یک آشکارساز دما دریافت می کنیم، سنسور RTD که مستقیماً به کنترل کننده PID متصل است. به این بازخورد یا مقدار واقعی می گوییم. این بازخورد یا مقدار واقعی با مقدار تنظیم شده مقایسه می شود و تفاوت بین این دو سیگنال خطا ما است. کنترل کننده PID بر اساس این مقایسه خروجی را تولید می کند و خروجی را به شیر کنترل می دهد.
برای حفظ دمای کوره، در اینجا جریان گاز را توسط یک شیر کنترل کنترل می کنیم. موقعیت این شیر کنترل در اینجا از طریق کنترل کننده PID. زمان پاسخ فرآیند صرفاً به سه مقدار مانند بهره متناسب، زمان انتگرال و زمان مشتق بستگی دارد.
حالت کنترل تناسبی (P-Controller) در کنترلر پی آی دی:
کنترلکننده متناسب خروجی کنترل را متناسب با خطا تولید میکند. این مقدار خطا با بهره متناسب ضرب می شود تا پاسخ خروجی مشخص شود.
اگر بهره خیلی زیاد تنظیم شود، خروجی کنترل کننده شروع به نوسان می کند و ناپایدار می شود و اگر بهره در مقدار بسیار کم تنظیم شود، خروجی کنترل کننده به تغییرات مقدار تنظیم شده پاسخ نمی دهد.
استفاده از کنترل کننده متناسب به تنهایی دارای یک اشکال بزرگ است. offset یک خطای پایدار است و انجام نخواهد شد با استفاده از یک کنترل کننده تناسبی به تنهایی حذف می شود.
زمانی که بهره متناسب افزایش می یابد، سرعت پاسخ افزایش می یابد.
حالت کنترل یکپارچه (PI-Controller) در کنترلر پی آی دی:
به دلیل محدودیت یک کنترل کننده متناسب، یک افست پیوسته وجود دارد. کنترل کننده انتگرال به طور مداوم خروجی کنترلر را افزایش و کاهش می دهد تا خطا را کاهش دهد.
اگر مقدار خطا بزرگ باشد، حالت انتگرال خروجی کنترلر را سریع افزایش/کاهش دهید و اگر مقدار خطا کوچک باشد، حالت انتگرال عملکرد را کند می کند.
برای زمان انتگرال بزرگ، سرعت پاسخ کنترل کننده کاهش می یابد و برای زمان انتگرال کوچک، سرعت پاسخ سریع خواهد بود.
حالت کنترل مشتق (PID-Controller):
محدودیتی برای I-controller وجود دارد که نمی تواند رفتار آینده خطا را پیش بینی کند. بنابراین زمانی که مقدار تنظیم شده تغییر می کند، فقط یک بار واکنش نشان می دهد.
کنترل کننده مشتق خروجی را بر اساس نرخ خطا تغییر می کند و به سرعت کار می کند و سپس کنترل کننده PI. اگر تغییری در خطا ایجاد نشود، خروجی این کنترلر صفر است.
سرعت پاسخ با افزایش در زمان مشتق افزایش مییابد. اگر مقدار زمان مشتق خیلی بزرگ باشد، نوسان رخ می دهد و سیستم ناپایدار می شود. برای مقدار صفر زمان مشتق، خروجی کنترل کننده صفر می شود.
گراف کنترلر P در مقابل PI در مقابل PID

اینجا چند نمونه از PID-Controller به طور کلی در صنایع استفاده می شود:

در مثال بالا، با کنترل موقعیت شیر کنترل با استفاده از تابع PID داخلی PLC.

در مثال بالا، ما فشار مکش را در یک مقدار مشخص با کنترل سرعت موتور با استفاده از تابع PID داخلی PLC کنترل می کنیم.
کاربرد:
کنترلر پی آی دی در کروز کنترل خودرو
سامانه کنترل سرعت در خودرو یا کروز کنترل (cruise control)، یکی از ضروری ترین PID کنترلرهای مورد استفاده در زندگی روزمره ما است.
ابتدا سرعت ماشین را به سرعت مدنظرمان می رسانیم، سپس کروز کنترل خودرو را تنظیم می کنیم.
کروز کنترل سیگنال های خروجی را برای تنظیم سرعت، به throttle (خفه کننده) ارسال می کند.
یک سنسور سرعت (speed sensor) با به دست آوردن فیدبک حلقه کنترل و ارسال آن به کروز، کم یا زیاد شدن سرعت و مقدار این افزایش یا کاهش را برای throttle ماشین تعیین می کند.

کنترل دما با کنترلر PID (تاسیسات حرارتی)
PID های کنترل کننده دما یک نوع مستقل و رایج مورد استفاده در تولید و صنعت هستند.
این کنترل کننده ها کارایی بالایی در کنترل درجه حرارت تجهیزات مختلف دارند و استفاده و راه اندازی از آن ها بسیار ساده است.

برای مثال،
یک کنترل کننده PID درجه حرارت لوله های فرآیند را کنترل می کند.
در ابتدا، مثلا، 200 درجه فارنهایت را به عنوان نقطه تنظیم (set point) وارد می کنیم.
حال کنترلر، سیگنالی را به خروجی می فرستد تا گرمایش را آغاز کند.
فیدبک حلقه کنترل به شکل یک ترموکوپل است که درجه حرارت را می خواند.
در مثال ما، کنترلر PID می تواند به عنوان کنترل خاموش-روشن در سیستم ایجاد گرمایش کار کند.

همراه با نقطه تنظیم 200 درجه، ما کنترل کننده را در چند درجه بالا و پایین 200 نیز قرار می دهیم.
هنگامی که ترموکوپل دمای 202 درجه را خواند، گرمایش خاموش می شود.
هنگامی که 198 درجه را خواند، گرمایش روشن می شود.
این ساده ترین شکل از کنترلر PID است.

نمونه های بیشتری از توابع PID در بخش اتوماسیون در صنعت وجود دارد.
بعدی را بخوانید:
چگونه یک کنترلر PID را تنظیم کنیم؟
در صورت هرگونه سوال و نظر با مجموعه پرگاران تماس حاصل فرمایید.
جهت کسب اطلاعات بیشتر اینجا کلیک کنید.
یا. یا .3 یا. و . 2 یا. و .یا . . 1 و. یا. و. یا. و. 1 یا. و. یا. و.یا .ویا. 4 یا. و. 5 یا. و. یا. 6 یا 7. و. یا. و. یا. 8 و. 9 و و . .. . 2 یا. یا. و. یا. 8 و. . . 1 و. یا. و. یا. و. 1 یا. و. یا. و.یا .ویا. 4 یا. و. 5 یا. و. یا. 6. یا. و.یا .ویا. 4 یا. یا .3 یا. و . 2 یا. و .یا . . 1 و. یا. و. یا. و. 1 یا. و. یا. و.یا .ویا. 4 یا. و. 5 یا. و. یا. 6 یا 7. و. یا. و یا. 8 و. 9 و و . .. . 2 یا. یا. و. یا. 8 و. . . 1 و. یا. و. یا. و. 1 یا. و. یا. و.یا .ویا. 4 یا. و. 5 یا. و. یا. 6. یا. و.یا .و
مطالب مرتبط

توالی روشن و خاموش نوار نقاله PLC
توالی روشن و خاموش نوار نقاله PLC چگونه است ؟
این برنامه PLC برای کنترل ...
پرگاران

کاربرد دریچه های کنترل با منطق نردبان PLC
کاربرد دریچه های کنترل با منطق نردبان PLC چیست ؟
نمودار نردبان PLC را برای کاربرد دریچههای ...
پرگاران

سخت افزار و نرم افزار اسکادا
سخت افزار و نرم افزار اسکادا کدام اند ؟
یک سیستم SCADA شامل تعدادی واحد پایانه راه ...