

مبلغ کل: 4,770,000تومان
کنترل سرعت پیشرانه موتور الکتریکی کشتی
پرگاران
کنترل سرعت پیشرانه موتور الکتریکی کشتی چگونه است ؟
“سادگی ایدهآل موتور القایی، برگشتپذیری کامل آن، و سایر ویژگیهای منحصربهفرد آن را بسیار مناسب برای نیروی محرکه کشتی میسازد.”
– در فوریه ۱۹۱۷ نوشت، نیکولا تسلا، دانشمند علم موتورهای القایی، یکی از طرفداران اولیه نیروی محرکه الکتریکی برای کشتی ها بود.
نویسنده: Jagabandhu Majumder FIE، دانشکده IMTC Mumbai
پیشران درایو Podded
Azipod که مخفف Azimuthing Podded Drive است، نشان دهنده یک رویکرد انقلابی در پیشرانه است که توسط ABB ساخته شده است و با عملکرد عالی خود در خشن ترین یخ به استاندارد صنعتی برای کشتی های یخی تبدیل شده است. شرایطی که کشتی ها را قادر می سازد به طور مستقل از مسیر دریای شمال عبور کنند. در اواخر اوت ۲۰۱۹، پیشرانه Azipod تاریخ ساز شد و یک یخ شکن گارد ساحلی نروژ را تا قطب شمال هدایت کرد.
این استحکام بدنه و فناوری نیروی محرکه الکتریکی غلاف دار، توانایی منحصر به فرد برای چرخش ۳۶۰ درجه شناور با گشتاور کامل و رانش در هر جهت با ترکیب مفهومی کشتی دوکاره قطب شمال (DAS) ساخته شده است. همه دستاوردهای فوق و سفر در طول سال ممکن است، که به کشتیهای کانتینری نیز قابلیت یک کشتی یخشکن را میدهد و آنها را قادر میسازد تا ۱٫۷ متر یخ سطحی و بیش از ۱۰ متر یخ پشتهدار را با قدرت نصب شده بسیار کمتر (۱۳ مگاوات) برش دهند. ) و مصرف انرژی کمتری نسبت به کشتیهای دیزلی معمولی با وزن و طراحی بدنه یکسان.

شکل ۱ حامل ال ان جی دو اثره که حالت یخ سنگین را پیش می برد
در دماهای پایین -۵۰ درجه سانتیگراد کار می کنند، ناوگانی متشکل از ۱۵ کشتی حامل LNG کلاس یخ Arc7 که محموله مایع را حمل می کنند معمولاً به عنوان تانکرهای دو کاره با پیشرانه غلاف آزیموت شناخته می شوند. مفهوم حمل و نقل نفت بین قطب شمال روسیه و اروپا را توسعه داد و اولین تانکر دو اثره نوعی کشتی یخ شکن است که برای حرکت در آب های آزاد و یخ های نازک طراحی شده است، اما در شرایط یخ سنگین به دور خود می چرخد و به سمت عقب حرکت می کند. به این ترتیب، کشتی می تواند به طور مستقل در شرایط یخ شدید بدون کمک یخ شکن عمل کند، اما عملکرد بهتری در آب های آزاد نسبت به کشتی های یخ شکن سنتی دارد
اولین کشتی باری که از مورمانسک به شانگهای از طریق مسیر دریای شمال – بدون کمک یخشکنها – حرکت کرد، اخیرا اولین گذرگاه خود را به پایان رساند و یک سفر ۶۵ روزه را به پایان رساند. بازی برگشت به ۱۹ روز کاهش یافت
به طور عمده دو تولید کننده سیستم محرکه غلاف وجود دارد. ABB بزرگترین تولید کننده است و دارای دو نوع غلاف، Azipod (5-30 مگاوات) و Compact (0.4-5 مگاوات) است. رولزرویس (RR) دومین شرکت بزرگ در بازار است که غلافی به نام Mermaid (5 تا ۲۵ مگاوات) تولید می کند.
جدیدترین سری Azipod M مجهز به موتورهای آهنربای دائم نسل چهارم ABB است که از فناوری های پیشرانه آزیپاد اثبات شده استفاده می کند و برای افزایش بیشتر قدرت و به حداکثر رساندن راندمان اصلاح شده است. سادگی طراحی سیستم، استحکام و قابلیت اطمینان بیشتری را فراهم میکند و در عین حال امکان نگهداری آسان را فراهم میکند.
پاد پیشرانه نوعی از پیشرانه آزیموت نصب شده در محل پروانه معمولی است که ترکیبی از سیستم فرمان و پروانه متشکل از یک موتور الکتریکی یکپارچه نصب شده در یک غلاف است که مستقیما یک ملخ با گام ثابت را هدایت می کند.
مجموعه غلاف در خارج از بدنه کشتی غوطه ور است، در یک تله کابین در زیر قسمت عقب کشتی نصب شده است و دارای یک خط شفت کوتاه متشکل از پروانه، مهر و موم، یاتاقان و شفت است. موتور AC.

شکل ۲ بخش های سیستم پیشرانه غلاف
ماژول فرمان شامل اجزای مکانیکی شامل موتورهای فرمان الکتریکی/هیدرولیک، گیربکس چرخان، یاتاقان چرخشی و آب بندی چرخان است که عملکرد فرمان Azipod را فعال می کند. مکانیک فرمان با یک بلوک نصب به کشتی متصل می شود.
هر ماژول فرمان Azipod از چهار موتور فرمان تشکیل شده است، هر موتور نیرو را از طریق دنده سیاره ای و کلاچ اضافه بار که در محور بین دنده کاهش و موتور فرمان قرار دارد به لبه دنده اصلی منتقل می کند. که از مکانیک فرمان در برابر بارهای تصادفی خارجی و همچنین دنده سیاره ای و دنده اصلی در صورت اضافه بار سنگین محافظت می کند.
موتور AC با سرعت کنترل شده توسط یک درایو با فرکانس متغیر از طریق حلقه های لغزش کنترل می شود، گشتاور کامل و صاف را در هر جهت و در سرعت های پایین فراهم می کند، بنابراین مانورپذیری عالی را ارائه می دهد. اجازه می دهد تا کشتی های بزرگ را در فضاهای محدود بدون کمک یدک کش هدایت کنید. موقعیت یابی پویا کشتی برای کشتی های کروز با تعداد کافی واحد پیشران غلاف امکان پذیر است.
قابلیت چرخش مؤثرتر و ایمنتر پیشرانه آزیپاد در این مطالعه با آزمایشهای دایره چرخشی کامل و با سرعت کامل بین کشتیهای خواهر MS Fantasy، با پیشرانه معمولی تأیید شده است. و MS Elation با پیشرانه Azipod که ۳۸ درصد کاهش قطر تاکتیکی را ثبت کردند.
 >
>
مجموعه ملخ غلاف حول یک محور عمودی می چرخد و می تواند ۳۶۰ درجه بچرخد و برای هدایت کشتی استفاده می شود، در نتیجه سکان را از بین می برد و همچنین برای کشتی ها جلوتر و آسان تر است. سمت راست برای کنترل جهت حرکت بدون نیاز به معکوس کردن موتور محرک اصلی یا استفاده از پروانه گام قابل کنترل.
مشخصه پیشرانه POD تکامل یافته این است که ملخ کشتی را می کشد، برخلاف فشار معمولی و کم کارآمدتر. همچنین مشخص شد که فاصله توقف تصادف به میزان قابل توجهی کاهش یافته است زیرا میتوان معکوس را با معکوس کردن سرعت پروانه یا چرخاندن واحد Azipod تا ۱۸۰ درجه انجام داد.
این سیستم نیاز به تجهیزات بسیار سنگین و حجیم مورد نیاز سیستمهای پیشران معمولی، از جمله خطوط شفت بلند، چرخ دندههای کاهش، ملخهای گام کنترلشده، و پیشرانههای عقب عرضی را از بین میبرد. ساخت و ساز بسیار آسان تر می شود، بار تعمیر و نگهداری به میزان قابل توجهی کمتر می شود و تلفات مکانیکی حذف می شود.

شکل ۳ حالت های مختلف مانور پیشرانه غلاف
مزایای پیشرانه POD
- تا ۲۰% راندمان انرژی بیشتر با کاهش مصرف سوخت و هزینه های چرخه عمر.
- قابلیت اطمینان و در دسترس بودن بیشتر توسط پیکربندی اضافی سیستم پیشرانه.
- صرفه جویی در زمان و هزینه در طول ساخت؛
- سیستم پیشرانه سازگار با محیط زیست مصرف کمتر سوخت باعث کاهش انتشار گازهای گلخانه ای می شود. حداقل نیاز به روان کننده ها نشت های احتمالی را کاهش می دهد. پیشرانه غلاف نیز امکان استفاده از روان کننده های زیست تخریب پذیر را فراهم می کند.
- مانورپذیری عالی. ایمن و قابل مانور حتی بزرگترین کشتی ها را می توان با دقت دسی متر مانور داد. می توان به سرعت و با خیال راحت وارد بندرگاه های باریک شد.
- ارتعاش بدنه کاهش می یابد و اثر رزونانسی پروانه وجود ندارد.
- اثر کاویتاسیون به دلیل کوچکتر بودن قطر پروانه کاهش می یابد،
- عملکرد اقتصادی با سرعت کاهش یافته و تعداد ژنراتورهای تامین کننده را می توان با توجه به تقاضای برق مطابقت داد.
سیستم قدرت الکتریکی پیشرانه غلاف
یک نمودار تک خطی سیستم های قدرت الکتریکی پیشرانه غلاف در شکل ۴ نشان داده شده است که از مجموعه های دو غلاف تشکیل شده است که هر کدام دقیقاً دارای پیکربندی یکسان مستقل از یکدیگر هستند. هر موتور دارای دو سیم پیچ استاتور با مبدل فرکانس برای افزونگی است.
یک سیستم معمولی Pod Propulsion دارای چهار ژنراتور اصلی است که به تابلوی اصلی متصل می شوند و تابلوی ولتاژ پایین توسط ترانسفورماتورهای سرویس کشتی تامین می شود. تابلوی اصلی را می توان با استفاده از کلیدهای اتصال به دو شبکه مجزا تقسیم کرد تا افزونگی نیروگاه را افزایش دهد.
سیستم های قدرت محرکه غلاف معمولاً از مجموعه ژنراتور ولتاژ بالا ۱۱ کیلو ولت / ۶٫۶ کیلو ولت تشکیل شده اند و تابلوهای برق، ترانسفورماتورهای پله پایین، مبدل های فرکانس در اتاق غلاف در کشتی قرار می گیرند. و موتورهای سنکرون در غلاف برای نیروی محرکه.
واحد حلقه لغزش برای انتقال توان کنترل شده با ولتاژ و فرکانس از مبدل به موتور در غلاف آزادانه چرخش استفاده می شود.

شکل ۴ نمودار تک خطی معمولی سیستم Pod Propulsion onboard
موتورهای محرکه و اجزای تحریک
سه نوع پیشرانه استفاده می شود: موتورهای سنکرون، مغناطیس دائمی و القایی. متداول ترین ضریب توان با راندمان بالا ۰٫۹ در موتور پیشرانه با برد توان بالا، موتور سنکرون است. (SM) به دلیل توان خروجی زیاد.
روتور SM با سرعت سنکرون کار می کند، به این معنی که روتور با سرعت همزمان میدان چرخش سیم پیچ استاتور در حال چرخش است. اما موتور القایی افزایش قابل توجهی در پیشرانه های غلاف با قدرت کوچکتر ایجاد می کند.
اصل کار موتور سنکرون (SM)
ساخت SM مشابه Alternator است. هنگامی که منبع تغذیه سه فاز به استاتور داده می شود، میدان مغناطیسی دوار بین شکاف استاتور و روتور ایجاد می شود. روتور توسط منبع DC برانگیخته می شود و باعث ایجاد قطب شمال و جنوب روی روتور می شود.

تغذیه DC برای مغناطیس کردن روتور روشن می شود زمانی که روتور شروع به چرخش حول سرعت سنکرون می کند با شروع به کمک یک محرک خارجی اولیه یا با کمک سیم پیچ دمپر (SM) مانند موتور القایی) یا مبدل فرکانس استاتیک راه اندازی می شود. قطب شمال و جنوب روتور و استاتور به یکدیگر متصل می شوند.
بنابراین، روتور با سرعت میدان مغناطیسی در حال چرخش شروع به چرخش می کند و موتور با سرعت سنکرون کار می کند. سرعت موتور فقط با تغییر فرکانس منبع تغذیه استاتور توسط مبدل فرکانس.
موتور سنکرون برای پیشرانه
دو روش برای ایجاد تحریک برای سیمپیچهای میدان وجود دارد، یا با حلقههای لغزنده و برسها یا با استفاده از دستگاه تحریک بدون جاروبک که به وسیله آن تعمیر و نگهداری بسیار ساده میشود، زیرا برس و برس وجود ندارد. حلقه های لغزنده.
کلاس

شکل ۵ تحریک بدون جاروبک موتور سنکرون POD سیم پیچ های روتور
سیستم تحریک بدون جاروبک، جریان DC از یک واحد تحریک کننده که روی همان شفت روتور اصلی نصب شده بود، به روتور موتور پیشرانه می رسید. AC تولید شده در روتور محرک از طریق یک واحد یکسو کننده دیود دوار به DC تبدیل شد و به روتور موتور محرکه عرضه شد.
تحریک روتور توسط Brush & حلقه لغزنده
کاربردهایی برای سرعت متغیر که در آن کنترل سرعت یا گشتاور بسیار سریع و دقیق مورد نیاز است، موتور به طور کلی مجهز به برس ها و یک واحد حلقه لغزنده است تا امکان تحریک و کنترل موتور را فراهم کند. مبدل فرکانس.

دو حلقه لغزنده از نوع صورت وجود دارد که به صورت متحدالمرکز قرار گرفته اند که با دسترسی از طریق پوشش های بازرسی قابل جابجایی روی شفت موتور نصب می شوند. واحد حلقه لغزش با برس ها شامل نصب مجموعه حلقه لغزنده، مجموعه پل دیود، مجموعه برس کربن و واحد حذف گرد و غبار نصب شده بر روی روتور محرک موجود و مجموعه هاب استاتور است.
تحریک روتور از یک ترانسفورماتور تحریک و مبدل تحریک تامین می شود. مبدل تحریک کننده یک مبدل سه فاز با تریستورهای پشت به پشت (SCR) است که می تواند تحریک پیشرانه SM را همانطور که در شکل ۴ نشان داده شده است تنظیم کند.
موتور SM را می توان با مبدل های فرکانس با راه اندازی مبدل فرکانس ساکن راه اندازی کرد و سرعت آن را دقیقاً کنترل کرد. این یک مزیت بزرگ در هنگام مانور دادن از طریق بنادر و مکانهای پهلوگیری است.
موتور سنکرون مغناطیس دائم (PMSM)
موتور سنکرون آهنربای دائم (PMSM) مورد استفاده برای کاربردهای توان بالا، که دارای راندمان الکتریکی بالای ۹۸٪، ضریب توان خوب، و طراحی قوی و قابل اعتماد است.
تلفات روتور به حداقل می رسد و همچنین برس ها و حلقه های لغزنده یا اجزای تحریک بدون جاروبک مورد نیاز برای مغناطیس کردن روتور را حذف می کند.

موتور سنکرون آهنربای دائم (PMSM) شکل ۶
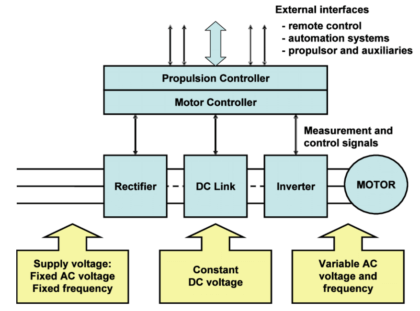
تبدیل فرکانس
هدف مبدل فرکانس کنترل سرعت و گشتاور موتور با تغییر فرکانس ثابت به فرکانس و ولتاژ متغیر است. توسعه فنی نیمه هادی ها مهم بوده است و بسیاری از طراحی های مختلف مبدل ها را ممکن ساخته است.
یک مبدل دارای اثرات ناخواسته ای مانند اعوجاج هارمونیک است که ممکن است سیستم را مختل کند.

شکل: جریان نیرو و کارایی نصب پیشرانه الکتریکی پاد
متداول ترین مبدل فرکانس مورد استفاده در درایو پیشرانه غلاف
نوادگان مستقیم فناوری درایو DC و استفاده از اجزای نیمه هادی از یکسو کننده کنترل شده سیلیکونی (SCR) یا “تریستور”.
تریستورها به عنوان یکسو کننده کنترلشده سیلیکونی (SCR) با اعمال پالس شلیک، جریان گیت کوچک هنگامی که در بایاس رو به جلو است روشن میشود و هنگامی که جریان آند به صفر میرسد خاموش میشود.
ولتاژ خروجی با تغییر زاویه شلیک یا تاخیر پالس گیت SCR تغییر می کند.
- مبدل چرخشی (Cyclo) برای موتورهای AC، معمولاً برای موتورهای سنکرون
- مبدلهای نوع اینورتر منبع فعلی (CSI) برای موتورهای AC (موتورهای سنکرون)
جدیدترین نوع مبدل فرکانس به دلیل پیشرفت فنی نیمه هادی های قدرت با استفاده از سوئیچ های قابل کنترل با سرعت بالا مانند ترانزیستور دوقطبی گیت عایق (IGBT) یا دروازه یکپارچه کنترل شده با دو مورد فوق متفاوت است. تریستورها (IGCT). به جای تریستورها.
این مبدل فرکانس به عنوان VSI-PWM شناخته می شود زیرا IGBT/IGCT می تواند با سرعت بالا روشن و خاموش شود، بنابراین ولتاژ خروجی را می توان با پالس-پدولاسیون-مدولاسیون کنترل کرد. (PWM). ❖ مبدل های نوع مبدل منبع ولتاژ (VSI) برای موتورهای AC، یعنی موتورهای سنکرون ناهمزمان، سنکرون و آهنربای دائم.
یک تفاوت عمده بین این سه مبدل فرکانس سوئیچینگ آنهاست، جایی که VSI بالاترین فرکانس خروجی را در حدود ۳۰۰ هرتز دارد. CSI دارای حداکثر فرکانس خروجی تقریباً ۱۲۰ هرتز است در حالی که cyclo فقط قادر است ۴۰٪ فرکانس ورودی را ارائه دهد، ۲۵ هرتز در ورودی ۶۰ هرتز.
Cycloconverter
Cyclo-Converters یک درایو AC با تکنولوژی قدیمی تر است، مبدل های فرکانس AC به AC یک ولتاژ ثابت با فرکانس ثابت AC را به شکل موج AC دیگری با فرکانس پایین تر منبع تغذیه تبدیل می کند. سرعت موتور مورد نظر.

اینها مبدلهای فرکانس مستقیم با کموتاسیون طبیعی هستند که از تریستورهای با کموتاسیون طبیعی استفاده می کنند. مزیت اصلی سیکلو مبدل این است که می تواند گشتاور بالا در سرعت کم با ضربان گشتاور کم و رفتار دینامیکی خوب تولید کند.
عیب Cyclo-Converter این است که فرکانس خروجی محدود به یک سوم فرکانس ورودی برای توان خروجی و کارایی معقول است.
Cyclo-Converter از شش گروه مدار مبدل تشکیل شده است که به سه گروه مبدل پل مثبت می گویند و سه گروه دیگر مبدل پل منفی هستند که در جهت مخالف (پشت به پشت) وصل شده اند. ، با هر دو پل از ترانسفورماتورهای کاهنده HV درونی تغذیه می شوند.
این امر ولتاژ موتور و سطح عایق مورد نیاز آن را کاهش میدهد و همچنین امپدانس خط اضافی را برای محدود کردن اندازه جریان خطای احتمالی و اعوجاج ولتاژ هارمونیک در شین بار اصلی تامین میکند.

تبدیل چرخه ای شکل ۷ برای کنترل سرعت موتور سنکرون
در طول هر نیم چرخه مثبت، گروه مثبت جریان را حمل می کند و در نیمه چرخه منفی، گروه منفی حامل جریان است.
مدت رسانش هر گروه از تریستور فرکانس خروجی مورد نظر را تعیین می کند.
کلاس

مقدار متوسط ولتاژ خروجی با تغییر زاویه شلیک یا تأخیر هدایت SCRها تغییر می کند، در حالی که فرکانس خروجی را می توان با تغییر ترتیب شلیک SCR ها تغییر داد.
اینورتر منبع فعلی (CSI) & اینورتر منبع ولتاژ (VSI)
دو نوع رایج اینورترها اینورتر منبع جریان (CSI) و اینورتر منبع ولتاژ (VSI) هستند. همانطور که از نام آنها پیداست، اینورترهای منبع جریان با جریان ثابت تغذیه می شوند، در حالی که اینورترهای منبع ولتاژ با ولتاژ ثابت تغذیه می شوند.
در نتیجه، خروجی یک درایو CSI قابل تنظیم و جریان AC سه فاز است، در حالی که درایو VSI ولتاژ متناوب سه فاز را با مقدار و فرکانس قابل تنظیم تولید می کند. تفاوت اصلی بین درایوهای CSI و درایوهای VSI روش ذخیره انرژی آنها است.
درایوهای CSI از ذخیره انرژی القایی استفاده می کنند—یعنی از سلف در پیوند DC خود برای ذخیره انرژی DC و تنظیم ریپل جریان بین مبدل و اینورتر استفاده می کنند.
برعکس، درایوهای VSI از ذخیره سازی خازنی استفاده می کنند، با خازن هایی در پیوند DC خود، که هم ولتاژ DC را برای اینورتر ذخیره می کند و هم صاف می کند.

شکل ۸ کنترل سرعت متغیر موتور پیشرانه برای مبدل های فرکانس نوع VSI و CSI
اصول کاری مبدل منبع فعلی (مبدل همگام)
یک مبدل همگام دارای یکسو کننده کنترل شده است که به عنوان مبدل سمت منبع/خط و مراحل اینورتر به عنوان مبدل سمت بار نامیده می شود که هر دو به خاموش شدن طبیعی یا کموتاسیون خط برای تریستورها متکی هستند. توسط ولتاژهای ac سه فاز در دو انتهای مبدل.

شکل ۹ درایو موتور سنکرون با استفاده از یک اینورتر تریستور با تغییر بار (CSI)
مبدل خط /طرف یک مبدل تریستور ۱۲ پالسی است که برق را از منبع تغذیه ستاره ترانسفورماتور تغذیه با فرکانس ثابت ۶۰ هرتز و amp; سیم پیچ چند ثانویه دلتا برای ایجاد یک تغییر فاز ۳۰ درجه برای یکسوسازی ۱۲ پالس برای کاهش اثر هارمونیک ها به دلیل پدیده سوئیچینگ پل تریستور.
جریان جریان در مبدل سمت خط با تنظیم زاویه شلیک مبدل سمت آفلاین تریستورهای پل ورودی و با کموتاسیون طبیعی خط تغذیه AC کنترل می شود.
القاگر یا راکتور پیوند DC برای صاف کردن جریان DC استفاده می شود که به طور موثر مبدل سمت خط را به مبدل منبع جریان برای مبدل سمت ماشین تبدیل می کند.
در نتیجه عملکرد سلف پیوند L، چنین اینورتر اغلب یک اینورتر منبع جریان با تغییر طبیعی (CSI) نامیده می شود که گاهی اوقات به عنوان یک اینورتر با تغییر بار (LCI) شناخته می شود. ) یا همگام.

شکل ۱۰ شکل موج جریان فاز از مبدل منبع فعلی
تریستورهای پل خروجی (مبدل سمت ماشین) همگام با چرخش موتور شلیک می شوند و با کنترل تریستورهای کموتاسیون مرحله اینورتر به عنوان یک کموتاتور الکترونیکی عمل می کنند. تریستور T1-T6 که با اختلاف فاز ۶۰ درجه در ترتیب تعدادشان شلیک می شوند.
هر شکل موج جریان فاز با اختلاف فاز ۱۲۰ درجه ۶ مرحله ای همانطور که در شکل ۱۰ نشان داده شده است به دست می آید که منجر به هارمونیک های موتور و موج های گشتاور می شود. CSI برای انجام کموتاسیون به یک ولتاژ ضد القایی معین (EMF) از موتور نیاز دارد. از این رو، عمدتاً در درایوهای موتور سنکرون استفاده می شود که در آن موتور می تواند با ضریب توان خازنی کار کند.
از آنجایی که پل های منبع تغذیه و ماشین یکسان هستند و هر دو به یک منبع ولتاژ متناوب سه فاز متصل هستند، نقش آنها را می توان به حالت معکوس تغییر داد. این برای امکان بازگشت مجدد نیروی موتور به منبع تغذیه اصلی مفید است که گشتاور ترمز الکتریکی را در هنگام توقف تصادف کشتی فراهم می کند.
اصول کار اینورترهای منبع ولتاژ (VSI)
درایوهای اینورتر منبع ولتاژ (VSI) از سوئیچهای برق با سرعت بالا با جابجایی اجباری با استفاده از PWM (مدولشده با عرض پالس) استفاده میکنند.
معمولاً از طیف گسترده ای از کلیدهای برق کموتاسیون اجباری استفاده می شود که عبارتند از تریستور خاموش کننده دروازه (GTO)، ترانزیستورهای دوقطبی گیت عایق – IGBT، و تریستورهای کموتاسیون دروازه مجتمع – IGCT.
تریستور خاموش کننده دروازه (GTO)
تریستور خاموش کننده دروازه (GTO) نوع خاصی از تریستور است که یک دستگاه نیمه هادی با قدرت بالا است.
این در GTOهای جنرال الکتریک اختراع شد، برخلاف تریستورهای معمولی، سوئیچهای کاملاً قابل کنترلی هستند که میتوانند توسط سومین لید آنها، سرب گیت، روشن و خاموش شوند.
ترانزیستورهای دوقطبی گیت عایق – IGBT
ترانزیستور دوقطبی گیت عایق (IGBT) یک دستگاه سوئیچینگ دستگاه نیمه هادی قدرت سه ترمینالی است که می تواند برای سوئیچینگ سریع با راندمان بالا استفاده شود که بیشتر برای سوئیچینگ/پردازش موج پیچیده استفاده می شود. الگوهای با مدولاسیون عرض پالس (PWM).
IGBT یک همجوشی بین ترانزیستور اتصال دوقطبی (BJT) و ترانزیستور اثر میدان نیمه هادی اکسید فلز (MOSFET)، سمت ورودی نشان دهنده یک ماسفت با ترمینال Gate و سمت خروجی نشان دهنده یک BJT با جمع کننده و امیتر است. جمع کننده و امیتر پایانه های هدایت هستند و دروازه ترمینال کنترلی است که با آن عملیات سوئیچینگ کنترل می شود.
هنگامی که یک ولتاژ مثبت کوچک به دروازه ای که IGBT روشن می شود اعمال می شود، یک IGBT مانند یک سوئیچ عمل می کند. جریان بین کلکتور و امیتر جریان خواهد داشت. IGBT را می توان با حذف ولتاژ مثبت از گیت خاموش کرد.
دیود چرخ آزاد از قطع جریان القایی جلوگیری می کند که از ولتاژ اضافه گذرا محافظت می کند، که ممکن است باعث خرابی معکوس سوئیچ های IGBT و MOSFET شود.
تریستورهای تعویض شده دروازه یکپارچه – IGCT
IGCT یک نیمه هادی قدرت جدید است که به طور مشترک توسط میتسوبیشی و ABB ساخته شده است. این یک کلید خاموش کننده با کنترل گیت است که مانند ترانزیستور خاموش می شود اما مانند تریستور با کمترین تلفات هدایت هدایت می شود.
IGCT تلفات روشن کردن ناچیزی ایجاد می کند زیرا می توان از یک کنترل روشن/خاموش فیبر نوری استفاده کرد که فقط به منبع تغذیه ۲۸ تا ۴۰ ولت نیاز دارد. زمان خاموش شدن بسیار سریعتر IGCT به آن اجازه می دهد تا در فرکانس های بالاتر کار کند. این، همراه با تلفات رسانایی کم، عملکرد را در فرکانسهای بالاتر از آنچه قبلاً توسط Thyristors یا IGBTS بدست میآمد امکانپذیر میکند.
روش تغییر فرکانس
با تغییر دوره پالس های ولتاژی که جریان را در فازهای موتور القا می کنند، فرکانس شکل موج جریان خروجی حاصل را می توان همانطور که در زیر توضیح داده شده تغییر داد.

فرکانس با تغییر دوره برای روشن و خاموش کردن سوئیچ IGBT S1 به S4 تغییر می کند.
مثلاً اگر سوئیچ های S1 و S4 برای ۱ ثانیه و S2 و S3 برای ۱ ثانیه روشن شوند و این عمل تکرار شود، AC با یک تناوب در ثانیه، یعنی AC با فرکانس ۲ هرتز ایجاد می شود.
موتور پیشرانه کنترل سرعت با تغییر فرکانس همچنین باید ولتاژ را متناسب با فرکانس کنترل کند تا مشخصه سرعت و گشتاور را در تمام سرعت ثابت نگه دارد.
مدولاسیون عرض پالس (PWM) برای کنترل ولتاژ
هدف PWM ایجاد یک خروجی شکل موج جریان موج سینوسی برای تولید گشتاور در موتور است.
PWM راهی برای کنترل دستگاه های آنالوگ با خروجی دیجیتال (روشن/خاموش) است که برای کنترل دامنه سیگنال های ولتاژ DC ثابت با چرخه روشن و خاموش کردن استفاده می شود. فازهای سیگنال ولتاژ DC به سرعت و تغییر عرض فاز “روشن” یا چرخه وظیفه همانطور که در شکل ۱۱ مشاهده می شود.

شکل ۱۱ تغییر ولتاژ بر اساس مدولاسیون عرض پالس & شکل موج جریان سینوسی در سیم پیچ موتور

- ۱۲ کنترل PWM برای ایجاد موج سینوسی معادل با سرعت بالا/پایین

شکل ۱۳ کنترل سرعت موتور توسط اینورتر منبع ولتاژ PWM سوئیچینگ IGBT
درایو PWM (مدول شده با عرض پالس) که اغلب به عنوان VSI (اینورتر منبع ولتاژ) نیز نامیده می شود، با پیوند ولتاژ DC خود مشخص می شود که از سیستم قدرت توسط یک دیود تغذیه می شود. یکسو کننده. یک بانک خازن برای صاف کردن ولتاژ لینک DC و به حداقل رساندن تأثیر اعوجاج هارمونیک از خروجی اینورتر PWM بر منبع تغذیه موتور استفاده میشود.
ضریب توان در حدود ۰٫۹۵۵ در تمام سرعت های موتور در سطح ثابتی حفظ می شود زیرا از پل دیودی برای تولید ولتاژ DC استفاده می شود، درایو PWM جریان ضریب توان تقریباً واحد را از منبع تغذیه می گیرد. منبع.
برای ایجاد یک جابجایی فاز ۱۲۰ درجه ای سه فاز بین فازها در VSI، سوئیچ های IGBT/IGCT/GTO در فواصل زمانی معین روشن و خاموش می شوند تا پالس های مستطیلی را ارائه کنند. ولتاژ هر فاز.
شکل ۱۵ ولتاژهای خط به خط اینورتر، VAB، VBC و VCA را نشان می دهد. ولتاژهای خط با اتصال پایانه های خط موتور به سمت بالا یا پایین ولتاژ باس DC تشکیل می شوند.
سه کلید اینورتر همانطور که در شکل ۱۳ نشان داده شده است همیشه بسته هستند و در هر نقطه از زمان یکی از ولتاژهای اعمال شده خط صفر است زیرا پایانه های موتور سه فاز باید به دو ترمینال DC متصل شود.
هر ۶۰ درجه یک کلید روشن می شود در حالی که دیگری خاموش می شود و در نتیجه ولتاژهای خط نشان داده شده در شکل.

شکل ۱۴ عمل تعویض سوئیچ IGBT هر بازه زمانی ۳۰ درجه

شکل ۱۵ اینورتر منبع ولتاژ شکل موج ولتاژ خط ۳ فاز
در صورت هرگونه سوال و نظر با مجموعه پرگاران تماس حاصل فرمایید.
جهت کسب اطلاعات بیشتر اینجا کلیک کنید.
مطالب مرتبط

سوئیچ توقف اضطراری SPURIOUS TRIP
سوئیچ توقف اضطراری SPURIOUS TRIP چیست؟
امروز در مورد یکی از مهمترین اجزای مورد استفاده در سیستم ...
پرگاران

کالیبراتور حلقه برای شبیه سازی سیگنال ۴-۲۰ میلی آمپر
کالیبراتور حلقه برای شبیه سازی سیگنال ۴-۲۰ میلی آمپر چگونه است ؟
فرض کنید تکنسین مایل است ...
پرگاران

تنظیم دستی پارامترهای کنترلر PID
تنظیم دستی پارامترهای کنترلر PID :
اگرچه روش های مختلفی برای تنظیم خودکار پارامترهای PID کشف شده ...