

مبلغ کل: 7,350,000تومان
پیکربندی و راه اندازی دستگاه H1 FF
پرگاران
پیکربندی و راه اندازی دستگاه H1 FF به چه صورت است ؟
دستگاه های فیلدباس به فاصله زیادی نیاز دارند در راه اندازی و راه اندازی اولیه نسبت به همتایان آنالوگ خود توجه بیشتری داشته اند. بر خلاف فرستنده آنالوگ، به عنوان مثال، که در آن تنها تنظیمات “پیکربندی” تنظیمات کالیبراسیون صفر و دهانه آن است، یک فرستنده FF دارای تعداد قابل توجهی از پارامترها است که رفتار آن را توصیف می کند. برخی از این پارامترها باید توسط کاربر نهایی تنظیم شوند، در حالی که برخی دیگر به طور خودکار توسط سیستم میزبان در طول فرآیند راهاندازی پیکربندی میشوند، که ما معمولاً از آن به عنوان راهاندازی یاد میکنیم.
فایل های پیکربندی
برای اینکه یک دستگاه FF با یک سیستم میزبان (که ممکن است توسط شرکت دیگری تولید شده باشد) با هم کار کند، دستگاه باید قابلیت های آن را به صراحت شرح دهد تا سیستم میزبان ” می داند با آن چه کند.»
این مشابه نیاز به فایلهای درایور هنگام اتصال رایانه شخصی با دستگاههای جانبی جدید مانند چاپگر، اسکنر یا مودم است.
یک زبان استاندارد برای ابزار دقیق دیجیتالی وجود دارد که Device Description Language یا DDL نامیده می شود. همه سازندگان ابزار FF موظفند قابلیتهای دستگاههای خود را به این زبان با فرمت استاندارد مستند کنند، که سپس توسط رایانه در مجموعهای از فایلها به نام فایلهای Device Description (DD) برای آن ابزار کامپایل میشود.
DDL خود یک زبان مبتنی بر متن است، بسیار شبیه به C یا جاوا که توسط یک برنامه نویس انسانی نوشته شده است. فایلهای DD از فایل منبع DDL توسط یک کامپیوتر تولید میشوند و به شکلی که برای دسترسی فقط خواندنی رایانه دیگری در نظر گرفته شده است، خروجی میشوند.
برای ابزارهای FF، فایلهای DD به پسوندهای نام فایل .sym و .ffo ختم میشوند و میتوانید بهطور رایگان از سازنده یا از وبسایت بنیاد فیلدباس (http://www.fieldbus.org) دریافت کنید.
. فایل ffo DD در یک فرمت باینری است که فقط توسط کامپیوتری با نرم افزار «خدمات DD» مناسب قابل خواندن است.
فایل .sym DD دارای کد ASCII است و با استفاده از یک برنامه ویرایشگر متن آن را برای انسان قابل مشاهده می کند (اگرچه شما نباید سعی کنید محتوای فایل .sym را ویرایش کنید).
سایر فایلهای مخصوص دستگاه که توسط سیستم میزبان یک بخش FF نگهداری میشوند، فایلهای Capability و Value هستند که هر دو به عنوان فایلهای فرمت مشترک یا فایلهای cff. شناخته میشوند.
اینها همچنین فایلهای دیجیتالی قابل خواندن متن (با کد ASCII) هستند که به ترتیب قابلیت دستگاه و مقادیر پیکربندی خاص دستگاه را توصیف میکنند.
فایل Capability برای یک دستگاه FF معمولاً از وبسایت سازنده یا بنیاد Fieldbus به همراه دو فایل DD، بهعنوان یک مجموعه سه فایل دانلود میشود (پسوندهای نام فایل به ترتیب .cff، .sym و .ffo هستند).
فایل Value توسط سیستم میزبان در طول پیکربندی دستگاه تولید میشود و مقادیر پیکربندی خاص را برای آن دستگاه خاص و شماره تگ سیستم ذخیره میکند.
دادههای ذخیرهشده در یک فایل Value ممکن است برای کپی کردن پیکربندی دقیق یک دستگاه FF ناموفق استفاده شود، و اطمینان حاصل شود که دستگاه جدیدی که جایگزین آن میشود،
همه پارامترهای مشابه را در بر خواهد داشت.
یک اسکرین شات از یک فایل قابلیت .cff که در یک برنامه ویرایشگر متن باز شده است،
در اینجا ظاهر می شود، که چند خط اول کد را نشان می دهد که قابلیت های یک فلومتر گرداب DYF مدل Yokogawa را توصیف می کند:
کلاس

همانطور که در مورد فایلهای “درایور” مورد نیاز برای ایجاد عملکرد دستگاه جانبی رایانه شخصی، مهم است که نسخههای صحیح فایلهای Capability و DD را قبلاً روی رایانه سیستم میزبان نصب کرده باشید.
تلاش برای راه اندازی دستگاه نصب فایلهای Capability و DD که جدیدتر از دستگاه فیزیکی هستند، مجاز است، اما برعکس (دستگاه فیزیکی جدیدتر از فایلهای Capability و DD) جایز است.
این نیاز به مدیریت فایل پیکربندی مناسب وظیفه جدیدی برای تکنسین و مهندس ابزار است تا در مشاغل خود مدیریت کنند.
با هر دستگاه FF جدیدی که در یک سیستم کنترلی نصب می شود،
فایل های پیکربندی مناسب باید برای نگهداری ایمن در صورت از دست دادن داده ها («خراش») در سیستم میزبان به دست آمده، نصب و بایگانی شوند.
راه اندازی دستگاه
راه اندازی یک دستگاه فیلدباس در یک بخش واقعی، نمایش تصاویری از منوهای پیکربندی سیستم میزبان.
دستگاه خاص یک موقعیتدهنده شیر Fisher DVC5000f است و سیستم میزبان یک سیستم کنترل توزیع شده DeltaV است که توسط امرسون ساخته شده است.
تمامی فایل های پیکربندی قبل از شروع تمرین در این سیستم به روز رسانی شدند.
به خاطر داشته باشید که مراحل خاصی که برای راه اندازی هر دستگاه FF انجام می شود از یک سیستم میزبان به سیستم دیگر متفاوت است و ممکن است از ترتیب مراحل نشان داده شده در اینجا پیروی نکند.
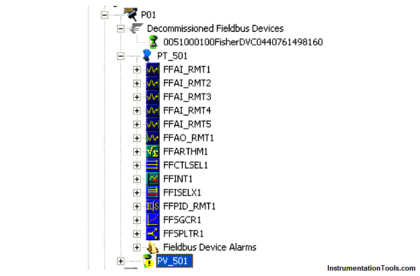
اگر یک دستگاه FF پیکربندی نشده به شبکه H1 متصل باشد، به عنوان یک دستگاه “از کار افتاده” ظاهر می شود.
در سیستم میزبان Emerson DeltaV، تمام دستگاه های FF از کار افتاده در یک پوشه تعیین شده در سلسله مراتب “کانتینر” ظاهر می شوند.
در اینجا، دستگاه Fisher DVC5000 من با رنگ آبی مشخص شده است.
یک دستگاه FF راه اندازی شده درست در زیر آن ظاهر می شود (PT 501) که تمام بلوک های عملکرد موجود در آن ابزار را نشان می دهد:

قبل از اینکه هر دستگاه FF توسط سیستم میزبان DeltaV شناسایی شود، باید یک “placeholder” و نام برچسب برای آن در سلسله مراتب بخش ایجاد شود.
برای انجام این کار، یک “دستگاه Fieldbus جدید” باید به پورت H1 اضافه شود. پس از انتخاب این گزینه، پنجره ای باز می شود که اجازه نامگذاری این دستگاه جدید را می دهد:

در اینجا، نام برچسب “PV 501” برای موقعیت دهنده شیر فیشر انتخاب شده است،
زیرا در ارتباط با فرستنده فشار PT 501 برای تشکیل یک حلقه کنترل فشار کامل کار می کند.
. علاوه بر یک نام برچسب (PV 501)، من همچنین یک توضیح متنی («شیر کنترل فشار (موقعیتدهنده)») اضافه کردهام و نوع دستگاه را مشخص کردهام (Fisher DVC5000f با قابلیت بلوک عملکرد AO، PID و IS).
سیستم میزبان DeltaV یک آدرس رایگان برای این دستگاه انتخاب کرده است (۳۵)، اگرچه امکان انتخاب دستی آدرس دستگاه مورد نظر در این مرحله وجود دارد.
به کادر “Backup Link Master” در این پنجره پیکربندی توجه کنید که به رنگ خاکستری است (که نشان می دهد گزینه در این دستگاه موجود نیست).
بعد از اینکه اطلاعات دستگاه برای نام تگ جدید وارد شد، یک نماد “placeholder” در سلسله مراتب بخش H1 (متصل به پورت ۱) ظاهر می شود.
می توانید نام برچسب جدید (PV 501) را در زیر آخرین بلوک عملکرد دستگاه FF راه اندازی شده (PT 501) ببینید. دستگاه واقعی هنوز از کار افتاده است و به این صورت ظاهر می شود:

با کلیک راست بر روی نام برچسب جدید و انتخاب گزینه “Commission”، پنجره جدیدی باز می شود که به شما امکان می دهد نام تگ جدید را برای کدام دستگاه از کار افتاده انتخاب کنید.
از آنجایی که تنها یک دستگاه از کار افتاده در این بخش H1 خاص وجود دارد، تنها یک گزینه در پنجره ظاهر می شود:

پس از انتخاب دستگاه از کارافتادهای که میخواهید راهاندازی کنید، سیستم میزبان DeltaV از شما میخواهد که هر گونه تفاوت بین مکاننمای نام برچسب جدید ایجاد شده و دستگاه از کار افتاده را با هم تطبیق دهید.
اگر میخواهید از مقادیر موجود ذخیره شده در دستگاه فیزیکی (از کار افتاده) استفاده کنید، از مرحله «تطبیق» صرفنظر میکنید.
اگر میخواهید مقادیر موجود در دستگاه را از آنچه در حال حاضر هستند تغییر دهید،
گزینه «تطبیق» را انتخاب میکنید که سپس یک پنجره ویرایش باز میشود که در آن میتوانید مقادیر دستگاه را به دلخواه تنظیم کنید.
 p>
p>
پس از انتخاب (یا عدم انتخاب) گزینه “reconcile”، سیستم DeltaV از شما می خواهد تا راه اندازی دستگاه را تأیید کنید، پس از آن یک سری از دنباله های نمایش متحرک به عنوان دستگاه از حالت “Standby” به “Commissioned” تغییر می کند:

همانطور که می بینید، فرآیند راه اندازی خیلی سریع نیست.
پس از تقریباً یک دقیقه کامل انتظار، دستگاه هنوز در حال «راه اندازی اولیه» است و هنوز «راه اندازی نشده است». سرعت شبکه ۳۱٫۲۵ کیلوبیت بر ثانیه و اولویت ارتباطات برنامهریزیشده عوامل محدودکننده هنگام تبادل مقادیر زیادی از دادههای پیکربندی بر روی یک بخش شبکه FF H1 هستند.
برای اینکه پیکربندی دستگاه انتقال داده های حیاتی فرآیند را قطع یا کند نکند،
همه تبادل داده های پیکربندی باید برای دوره های زمانی برنامه ریزی نشده منتظر بمانند و سپس با رسیدن زمان های اختصاص داده شده با سرعت نسبتاً آهسته ۳۱٫۲۵ کیلوبیت بر ثانیه ارسال کنند.
هر تکنسینی که به سرعت انتقال دادههای سریع دستگاههای اترنت مدرن عادت داشته باشد،
احساس میکند در زمانی که رایانهها بسیار کندتر بودند، قدمی به عقب برداشته است.
پس از راه اندازی این دستگاه در سیستم میزبان DeltaV، چندین مکان نگهدار در سلسله مراتب با مثلث های آبی در کنار آنها ظاهر می شوند.
در سیستم DeltaV، این نمادهای مثلث آبی نشان دهنده نیاز به دانلود تغییرات پایگاه داده در گره های توزیع شده سیستم هستند:

.
پس از “دانلود” دادهها، موقعیتدهنده شیر FF جدید مستقیماً در زیر فرستنده فشار موجود بهعنوان یک ابزار راهاندازی شده نشان داده میشود و آماده سرویس است.
بلوک های عملکردی برای فرستنده فشار PT 501 دوباره در نماد فرستنده “جمع شده” شده اند،
و بلوک های عملکردی برای موقعیت دهنده شیر جدید (PV 501) برای مشاهده “بسط” شده اند:

همانطور که می بینید، ابزار جدید (PV 501) تقریباً به اندازه ابزار اصلی FF (PT 501) بلوک های عملکردی ارائه نمی دهد.
تعداد بلوکهای تابع فیلدباس که توسط هر ابزار FF ارائه میشود، تابعی از توانایی محاسباتی آن ابزار، بارگذاری وظایف داخلی، و صلاحدید طراحان آن است.
بدیهی است که این عامل مهمی است که باید هنگام طراحی یک بخش FF در نظر گرفت:
مطمئن شوید که شامل ابزارهایی است که شامل تمام بلوک های عملکرد لازم برای اجرای طرح کنترل مورد نظر است. اگر یکی از ابزارهای FF در یک طرح کنترل با یکی از سازندگان یا مدل های مختلف جایگزین شود، این ممکن است مشکل ساز شود، که بلوک های عملکرد کمتری در دسترس دارد.
اگر یک یا چند بلوک عملکرد حیاتی در ابزار جایگزین موجود نباشد،
در صورت هرگونه سوال و نظر با مجموعه پرگاران تماس حاصل فرمایید.
جهت کسب اطلاعات بیشتر اینجا کلیک کنید.
مطالب مرتبط

گیج های فشار با لوله بوردون
گیج های فشار با لوله بوردون چیست؟
فشار سنج با لوله بوردون
لوله های بوردون لوله هایی دایره ای ...
پرگاران

حد پایین مواد منفجره (LEL)
حد پایین مواد منفجره (LEL) چیست؟
حداقل غلظت گاز قابل اشتعال در هوا که قابلیت اشتعال دارد ...
پرگاران

اصل کار شیر JT
شیر JT بر اساس این اصل کار می کند که وقتی فشار گاز/مایع تغییر می کند، دمای ...