
Foundation Fieldbus (FF) چیست؟
پرگاران
Foundation Fieldbus (FF) :
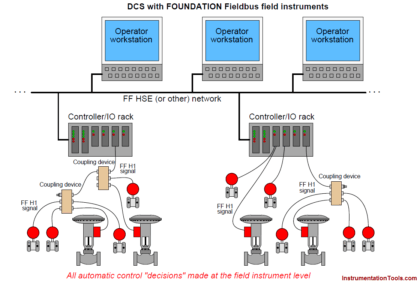
برای درک اینکه چقدر متفاوت است FOUNDATION Fieldbus از دیگر سیستم های ابزار دیجیتال است، یک طرح بندی معمولی برای یک سیستم کنترل توزیع شده در نظر بگیرید.
(DCS)، که در آن تمام محاسبات و «تصمیمگیریهای» منطقی در کنترلکنندههای اختصاصی گرفته میشوند، که معمولاً به شکل یک «رک» چند کارته با پردازنده (ها)، کارتهای ورودی آنالوگ، کارتهای خروجی آنالوگ و انواع دیگر I هستند. کارت های /O (ورودی/خروجی):

اطلاعات به شکل آنالوگ بین کنترلرهای DCS و ابزارهای میدانی مخابره می شود.
اگر DCS به انواع مناسب کارت های ورودی/خروجی مجهز باشد، حتی ممکن است با استفاده از پروتکل HART با برخی از ابزارهای میدانی به صورت دیجیتالی ارتباط برقرار کند.
این امکان پیکربندی از راه دور و آزمایش تشخیصی ابزارهای میدانی را از سیستم میزبان، یا از هر نقطه در طول کابل هنگام استفاده از یک ارتباط دهنده HART دستی فراهم میکند.
حتی می توان با استفاده از تمام ابزارهای میدان دیجیتال، با استفاده از پروتکلی مانند Profibus PA برای تبادل متغیر فرآیند (PV) و متغیر دستکاری شده (MV) یک سیستم کنترلی حول یک DCS ساخت. )
سیگنال هایی به و از کنترل کننده های DCS با سرعت های دیجیتالی بسیار بیشتر از HART:

اکنون، ابزارهای میدانی چند متغیره این توانایی را دارند که به سرعت داده های خود را با DCS به همراه اطلاعات مربوط به تعمیر و نگهداری (محدوده های کالیبراسیون، پیام های خطا و آلارم ها) مبادله کنند.
هر کابل “fieldbus” یک شبکه دیجیتال چند قطره است که به چندین دستگاه فیلد در هر کابل اجازه می دهد و در نتیجه طول کل کابل و تعداد اتصال را کاهش می دهد.
دستگاه های کوپلینگ ممکن است به جای بلوک های ترمینال برای اتصال راحت چندین ابزار به یکدیگر در شبکه های مشترک منتهی به DCS استفاده شوند.
با این حال، هنوز همه الگوریتمهای کنترل خودکار در DCS پیادهسازی میشوند.
یک FOUNDATION Fieldbus سیستم با اجازه دادن به همه الگوریتمهای کنترل در ابزارهای میدانی به جای اتکا به کنترلکنندههای DCS برای تصمیمگیری کنترل خودکار، یک قدم جلوتر میرود.
در واقع، اگر به پرسنل عملیات برای نظارت و تغییر وضعیت سیستم کنترل نیاز نباشد، DCS حتی ضروری نخواهد بود:
Foundation Fieldbus (FF)

.
که گفته شد، ممکن است (و در واقع متداول) الگوریتم های کنترلی علاوه بر الگوریتم های اجرا شده توسط دستگاه های میدانی FF.
موقعیتهای الگوریتمهای کنترل – آن دستورالعملهای ریزپردازنده که نحوه کنترل حلقه را دیکته میکنند – در این سیستمهای مختلف مستحق توضیح بیشتر است.
برای نشان دادن این، از علامت گذاری بلوک تابع برای نشان دادن محل اجرای الگوریتم ها در هر نوع سیستم استفاده می کنم، هر بلوک تابع به صورت یک کادر زرد در نمودار نشان داده شده است.
اول، DCS با I/O آنالوگ (ورودی/خروجی):
کلاس

تبدیل در نهایت، مقادیر خروجی دیجیتال بلوکهای PID به بلوکهای تابع «خروجی آنالوگ» (AO) منتقل میشوند، جایی که این مقادیر به سیگنالهای آنالوگ ۴-۲۰ میلی آمپر تبدیل میشوند
. شیرهای کنترل درایو، درایوهای فرکانس متغیر (VFD) و سایر عناصر کنترل نهایی.
هر “بلوک تابع” چیزی نیست جز بخشی از کد برنامه نویسی که به ریزپردازنده DCS دستور می دهد که با مقادیر سیگنال چه کاری انجام دهد.
بلوکهای تابع معمولاً توسط مهندسان و تکنسینهایی که DCS را با استفاده از نرمافزار برنامهنویسی گرافیکی نگهداری میکنند انتخاب و مرتب میکنند و به بلوکهای تابع اجازه میدهند تا روی یک پالت قرار گیرند و با خطوطی برای نشان دادن مکان متصل شوند. سیگنالهای آنها از آنجا میآیند و به آن میروند.
حالا اجازه دهید Profibus PA را دوباره بررسی کنیم. در اینجا، ابزارهای میدانی کاملا دیجیتال هستند و از طریق سیگنال های دیجیتال از طریق کابل شبکه به DCS با یکدیگر ارتباط برقرار می کنند.
این بدان معناست که هیچ یک از کابلها دیگر سیگنالهای آنالوگ را حمل نمیکنند و لازم است تبدیل A/D و D/A در داخل خود دستگاههای میدانی انجام شود.
همچنین به این معنی است که ممکن است کارت های ورودی/خروجی آنالوگ قدیمی را در رک DCS حذف کنیم و آنها را با یک کارت رابط شبکه جایگزین کنیم:
کلاس

تصمیمات کنترلی هنوز در ریزپردازنده DCS انجام می شود، به همین دلیل است که بلوک های تابع PID هنوز در کارت پردازنده نشان داده می شوند.
با این حال، تبدیل سیگنال آنالوگ-دیجیتال و عملیات مقیاس بندی، در خود ابزارهای میدانی رخ می دهد.
طبیعت شبکه های دیجیتالی این گونه است که ابزارهای متعدد ممکن است کابل ارتباطی یکسانی را به DCS به اشتراک بگذارند و هر ابزار به نوبت در زمان ارتباط برقرار کند.
FOUNDATION Fieldbus، در مقابل، اجازه می دهد حتی تصمیمات کنترلی در دستگاه های میدانی انجام شود و بار DCS را برای انجام وظایف سطح بالاتر در صورت لزوم تخلیه می کند:

با هر مرحله تکاملی در طراحی سیستم، روند به سمت “فشار دادن” الگوریتم های کنترل بیشتر به میدان، دور از سیستم کنترل مرکزی بوده است.
FOUNDATION Fieldbus است تحقق نهایی این روند، جایی که خود ابزارهای میدانی می توانند تمام عملکردهای کنترلی لازم را انجام دهند.
در اینجا، تنها اهداف ضروری DCS عبارتند از:
- پیکربندی اولیه و ابزار نگهداری برای ابزارهای FF
- به اپراتورها رابطی ارائه دهید که امکان نمایش و تنظیم پارامترهای کنترل را فراهم می کند
- دادههای “تاریخی” طولانیمدت را در مورد فرآیند تحت کنترل ثبت کنید
در واقع، با توجه به طراحی صحیح سیستم FF، DCS حتی می تواند از شبکه FF جدا شود و ابزارهای FF به کنترل فرآیند مانند قبل ادامه می دهند!
این بدان معنا نیست که همه الگوریتمهای کنترلی باید در ابزارهای فیلد در یک سیستم کنترل FOUNDATION Fieldbus اجرا شوند.
در واقع، یافتن سیستم های کنترل FF که با میزبان (DCS) که بیشتر کنترل را انجام می دهد، کاملاً معمول است.
FOUNDATION Fieldbus اجازه می دهد، اما اجباری نمی کند که همه وظایف کنترلی “در فیلد” باشند.
هنگامی که استاندارد FF در حال طراحی بود، دو سطح شبکه متفاوت برنامه ریزی شد: یک شبکه “کم سرعت” برای اتصال ابزارهای میدانی به یکدیگر برای تشکیل بخش های شبکه، و شبکه “سرعت بالا” برای استفاده به عنوان “ستون ستون فقرات” در سراسر کارخانه برای انتقال مقادیر زیادی از داده های فرآیند در فواصل طولانی تر.
شبکه کم سرعت (میدان) H1 تعیین شد، در حالی که شبکه پرسرعت (کارخانه) H2 تعیین شد.
بعداً در فرآیند توسعه استاندارد FF، متوجه شد که فناوری اترنت موجود، تمام الزامات اساسی یک “ستون ستون فقرات” پرسرعت را برآورده می کند، و بنابراین تصمیم گرفته شد که کار بر روی استاندارد H2 را رها کرده و روی پسوند ۱۰۰ مگابیت بر ثانیه مستقر شود.
اترنت HSE (“اترنت پرسرعت”) را به عنوان ستون فقرات شبکه FF نامید.
در صورت هرگونه سوال و نظر با مجموعه پرگاران تماس حاصل فرمایید.
جهت کسب اطلاعات بیشتر اینجا کلیک کنید.
مطالب مرتبط
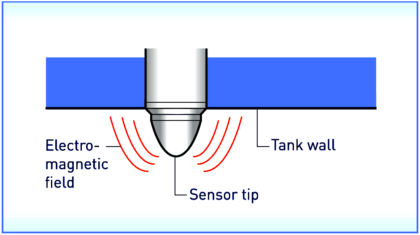
سوئیچ های محدود کننده الکترومغناطیسی و رسانا
سوئیچ های محدود کننده الکترومغناطیسی و رسانا
سوئیچ حد الکترومغناطیسی
فرایند اندازه گیری امواج الکترومغناطیسی امکان استفاده همگانی را ...
پرگاران

ترموکوپل
ترموکوپل thermocouple چیست؟
ترموکوپل thermocouple را می توان نوعی سنسور دما تعریف کرد که برای اندازه گیری دما در ...
پرگاران
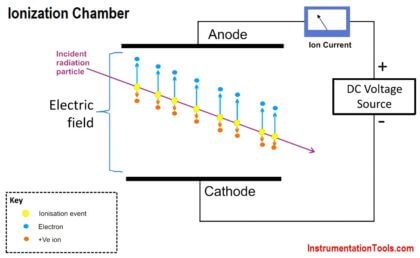
اتاقک یونیزاسیون
اتاقک یونیزاسیون چیست؟
محفظه یونیزاسیون ساده ترین آشکارساز تشعشعات پر از گاز است و به طور گسترده برای ...