
انواع مختلف دستگاه های محافظ توربین
پرگاران
انواع مختلف دستگاه های محافظ توربین کدام اند؟
این مقاله فهرستی از انواع مختلف دستگاههای محافظ توربین مانند توربین بیش از سرعت، فشار روغن کم روغن، جابجایی محوری، دمای توربین و توربین را ارائه میکند. ارتعاشات.
دستگاه های محافظ توربین
- دستگاه خاموش
- روغن کم روغن کاری.
- سفر بیش از سرعت
- خلاء کم
- SOV برای خاموش کردن از راه دور
- Hi/Lo Extrn. Pr.
- بسط پوشش
- خروجی/گسترش دیفرانسیل دمای اگزوز
- محافظت ژنراتور
- جابجایی محوری
- سفر دستی/از راه دور
- ارتعاشات یاتاقان
- دمای محفظه/روتور.
- دماهای تحمل
دستگاه خاموش
زمانی که قرار است توربین خاموش شود، فشار روغن حاکم توسط دستگاه خاموش کننده تخلیه می شود. بنابراین فشار جلوی دیسک پیستون شیر توقف و فشار روغن کنترل کاهش می یابد و در نتیجه شیر توقف و شیرهای کنترل بسته می شود.
سفر بیش از سرعت
محافظت از سرعت بیش از حد توسط سه حسگر مستقل سرعت توربین که از طریق انتخاب سیگنال خروجی دو یا سه پس از تجاوز از مقدار تنظیم شده سرعت امنیتی برای یک ضربه فوری برای بسته شدن ESV در کمتر از ۳۰ میلی ثانیه عمل می کند.
کلاس

پیکاپ مغناطیسی
یک پیکاپ مغناطیسی شامل یک آهنربای دائمی است که با سیم پیچی از چند هزار دور سیم مسی لعابی ظریف پیچیده شده است.
هنگامی که جسم فرومغناطیسی مجزا مانند دندانه های چرخ دنده یا تیغه ها از میدان مغناطیسی پروب عبور می کنند، چگالی شار تعدیل می شود. این باعث القای ولتاژ AC در سیم پیچ می شود. یک چرخه کامل ولتاژ برای هر جسم عبور داده می شود.
تعداد کل چرخه ها معیاری برای کل چرخش خواهد بود و فرکانس ولتاژ AC مستقیماً با سرعت چرخش شفت متناسب خواهد بود.
کلاس

 p>
p>
ساخت و شکستن خطوط شار ولتاژ متناوب را به سیم پیچ اطراف قطعه قطب القا می کند.
هر پالس با یک دندان دنده که از MPU عبور می کند نشان داده می شود. امپدانس MPU تقریباً ۲۲۰ اهم است.
 p>
p>
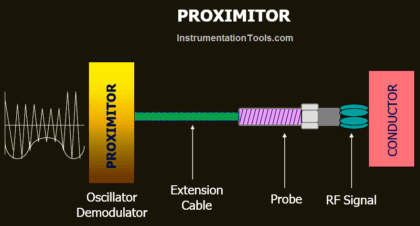
PROXIMITOR (کاوشگر جریان گردابی)
انرژی مکانیکی با استفاده از سیستم مبدل مجاورتی. دستگاه واسط مورد استفاده برای این سیستم proximitor نامیده می شود. با استفاده از مدار نوسانگر، یک سیگنال فرکانس شعاعی (RF) تولید می کند.
سیگنال RF از سیم پیچ پروب ارسال می شود که یک میدان RF در اطراف نوک پروب ایجاد می کند. وقتی مواد رسانا در میدان RF وجود دارد، جریان های گردابی در سطح آن ماده جریان می یابد.
هنگامی که کاوشگر به اندازه کافی نزدیک شود تا جریان های گردابی در یک ماده رسانا جریان یابد، سیگنال RF به دو صورت تحت تأثیر قرار می گیرد.
- زمانی که شکاف کمتر باشد، دامنه حداقل است.
- زمانی که شکاف بیشتر باشد، دامنه حداکثر است.
اگر هدف به آرامی در میدان RF حرکت می کند، دامنه سیگنال به آرامی افزایش یا کاهش می یابد. بسته به حرکت هدف، دامنه به آرامی یا به سرعت افزایش یا کاهش می یابد. این حرکات نوسانی هدف باعث تعدیل سیگنال RF می شود.
 p>
p>
این توسط دمدولاتور تبدیل می شود و یک سیگنال AC (موج سینوسی) می دهد. اگر هدف در حال نوسان است (فاصله به آرامی یا به سرعت در حال تغییر است)، پراکسیماتورها خروجی همچنین ولتاژ DC (AC) نشان داده شده در بالا را توسط یک موج سینوسی تغییر می دهد.
اگر کاوشگر ارتعاش، پروکسیمیتور هر دو قطعه DC (شکاف) و AC (ارتعاش) را در سیگنال خروجی ارائه می دهد. پاسخ فرکانسی از ۰ هرتز تا ۱۰ کیلوهرتز.
توسعه پوشش
این اندازه گیری حرکات بدنه یا پوسته توربین در رابطه با یک مکان ثابت است که معمولاً با LVDT (ترانسفورماتور دیفرانسیل متغیر خطی). گسترش کیس رشد حرارتی کیس دستگاه است زیرا در هنگام راهاندازی دستگاه و عملیات روی خط گسترش مییابد.
رشد حرارتی با سرعتهای مختلف میتواند باعث مالش داخلی بین قسمتهای چرخان و ثابت دستگاه شود.
سیستم مبدل انبساط کیس از LVDT برای اندازه گیری رشد حرارتی کیس دستگاه استفاده می کند.
یک میله روی LVDT به دستگاه متصل می شود. با رشد بدنه دستگاه، میله در داخل LVDT حرکت می کند. این باعث تغییر در سیگنال در LVDT می شود.
محدوده:- ۰ ~ ۲۵mm; سفر: – ۲۰mm
بسط روتور
در طول راه اندازی توربین، باید مراقب باشید تا اطمینان حاصل شود که کیس به درستی گرم شده و به اندازه کافی منبسط شده است تا از تماس بین روتور و کیس جلوگیری شود.
برای این مبدل کاوشگر ادی، سیگنالهای RF نوسانی با فرکانس بالا تولید میکند که از طریق کابل گسترش به نوک پیکاپ ارسال میشود. نوک پیکاپ که دارای سیم پیچی از سیم ریز است، یک میدان الکترومغناطیسی ساطع می کند، زیرا میدان تابشی توسط سطح روتور دو نیم می شود.
همانطور که سطح روتور به نوک پیکاپ نزدیک تر می شود، مقدار بیشتری جریان های گردابی متناسب با شکاف بین سطح و نوک پیکاپ ایجاد می شوند. سنسور سیگنال حاوی یک دمدولاتور است که افزایش جریان گردابی را اندازه گیری می کند و یک ولتاژ DC معادل متناسب با شکاف تولید می کند.
انبساط روتور در یک توربین اندازه گیری مطلق رشد حرارتی محوری روتور با توجه به پایه توربین است.
بسط دیفرانسیل
این پارامتر بسیار مهمی است که در هنگام راه اندازی و گرم شدن توربین مورد توجه قرار می گیرد. این پارامتر نحوه انبساط روتور توربین را در رابطه با پوسته یا پوشش توربین اندازه گیری می کند.
تفاوت بین Casing expansion & انبساط روتور را انبساط دیفرانسیل می گویند. این اندازه گیری نسبی رشد حرارتی محوری روتور با توجه به پوشش است.
انبساط دیفرانسیل روی توربین اندازه گیری نسبی رشد حرارتی محوری روتور با توجه به مورد است.
انبساط بدنه با توجه به پایه توربین.
منبسط شدن روتور با توجه به پایه توربین.
انبساط روتور با توجه به پوشش، انبساط دیفرانسیل
است
محدوده: -۴mm تا ۶mm
زنگ :- +۲٫۳۰mm & -1.60mm
سفر:- +۳٫۰۰mm & -2.50mm
کلید فاز
مبدلی که برای هر چرخش شفت یک پالس ولتاژ تولید می کند، به نام “KeyPhasor“. این یک پالس ولتاژ یک بار در هر دور تولید می کند.
زاویه فاز یا فاز، معیاری از رابطه نحوه ارتباط یک سیگنال ارتعاشی با سیگنال ارتعاشی دیگر است و معمولاً برای محاسبه قرارگیری وزنه تعادل استفاده میشود.
این سیگنال عمدتاً برای اندازه گیری سرعت چرخش شفت استفاده می شود و به عنوان مرجعی برای اندازه گیری زاویه تاخیر فاز ارتعاش عمل می کند.
مبدل کلید فازور معمولاً یک پروب مجاورت است. Keyphasor ابزار بسیار مفیدی برای تشخیص مشکلات ماشین آلات است.
فاکتور مقیاس استاندارد ۲۰۰mV/mil یا ۷٫۸۷mV/um است
۱ میلی = ۲۵٫۴ میکرون
جابجایی محوری روتور

دو نوع سفر
- جابجایی محوری روتور
- ارتعاش شعاعی
جدول زیر مقادیر هشدار و سفر را برای سیستم اندازه گیری لرزش خمیده نوادا نشان می دهد.
| S.No | DESCRIPTION | زنگ هشدار | سفر |
| ۱ | Key Phaser | xxx | xxx |
| 2 | جابجایی محوری | +/- ۰٫۵mm | +/- 0.8mm |
| 4 | برینگ روتور جلو | ۱۲۰u | 180u |
| 7 | بلبرینگ عقب روتور | ۱۲۰u | 180u |
| 8 | بیرینگ پینیون جعبه دنده | ۱۰۰u | 180u |
| 15 | بلبرینگ چرخ دنده | ۱۰۰u | 150u |
| 16 | برینگ DE دینام | ۱۰۰u | 180u |
| 19 | برینگ NDE دینام | ۱۰۰u | 180u |
| 20 | انبساط پوشش توربین | ۲۰mm | 25mm |
| 21 | انبساط دیفرانسیل توربین. به سمت probe | +2.3mm | +3mm |
| 22 | انبساط دیفرانسیل توربین. دور از Probe | -1.6mm | -2.5mm |
دماهای تحمل
دما یاتاقان ها معیاری است که نشان می دهد یاتاقان چقدر گرم کار می کند. ممکن است به دلیل بارگذاری بیش از حد، ناهماهنگی، فشار و/یا جریان نامناسب روانکار باشد.
تقریباً همه یاتاقان های ژنراتور توربین در ابتدا با سنسورهای دمای یاتاقان نصب شده بودند. این حسگرها ممکن است ترموکوپل یا RTD. هر بلبرینگی که در ابتدا مجهز به سنسور دما نبود، میتواند برای پذیرش ترموکوپلها یا RTDها تعبیه شود.
| TURBINE TRIP- TEMP | |||
| DECRIPTION – زیمنس فرماندار | I / O | SETPOINT | |
| TYPE | ALARM | TRIP | |
| TURB THRUST BRG TEMP BTM NEG | T / C | 110 | 120 |
| TURB BRG TEMP FRONT | T / C | 110 | 120 |
| TURB BRGTEMP REAR | T / C | 110 | 120 |
| گیگابایت PENION DE BRG TEMP | RTD | 100 | 110 |
| گیگابایت PENION NDE BRG TEMP | RTD | 100 | 110 |
| گیگابایت WHEEL DE BRG TEMP | RTD | 110 | 120 |
| گیگابایت WHEEL NDE BRG TEMP | RTD | 100 | 110 |
| GEN FRONT BRG TEMP | RTD | 85 | 90 |
| GEN REAR BRG TEMP | RTD | 85 | 90 |
محافظت ژنراتور
- دمای یاتاقان و سیم پیچ
- محافظت از خطای زمین
- قدرت رو به جلو معکوس/کم
- ولتاژ بیش از حد / ولتاژ کمتر
- بیش از فرکانس / کمتر از فرکانس
- بیش از جریان
- دیفرانسیل
- جابجایی خنثی
- توالی فاز منفی
توجه: هشدارها و مقادیر سفر ممکن است از تجهیزاتی به تجهیزات دیگر تغییر کند.
نویسنده: KR Rao
به اشتراک گذاشته شده توسط: Basavaraj Ambarage
در صورت هرگونه سوال و نظر با مجموعه پرگاران تماس حاصل فرمایید.
جهت کسب اطلاعات بیشتر اینجا کلیک کنید.
مطالب مرتبط

معیارهای انتخاب برای آشکارساز گاز سمی
معیارهای انتخاب برای آشکارساز گاز سمی :
ردیاب گاز سمی (H2S)
یک آشکارساز به گاز سمی حساس است.
معیارهای ...
پرگاران
نصب MySQL و ایجاد پایگاه داده نمونه (بخش ۱ از ۸)
نصب MySQL و ایجاد پایگاه داده نمونه چگونه است ؟
برای سری درسهای بعدی SQL که میخواهیم ...
پرگاران
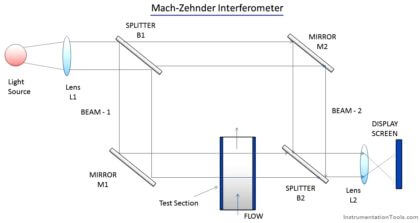
اصل تداخل سنج
تداخل سنج Interferometer ابزار دقیقی برای تجسم جریان است. تغییر ضریب شکست گاز جاری با چگالی اصل ...