

مبلغ کل: 7,350,000تومان
نرم افزار شبیه سازی ۶ محوره چیست؟
پرگاران
نرم افزار شبیه سازی ۶ محوره :
برنامه نویسی ربات های ۶ محور معمولاً دستی هستند در فرآیند، با استفاده از یک دستگاه آموزشی که معمولاً در دید روبات ۶ محوری است.
گاهی اوقات دسترسی آسانی به یک ربات ۶ محوره ندارید و همچنان باید یک ربات ۶ محوره را طراحی، برنامهنویسی یا عیبیابی کنید.
برخی از تولیدکنندگان ربات نرمافزاری برای شبیهسازی اجرای یک ربات ۶ محوره برای کمک به طراحی دارند.
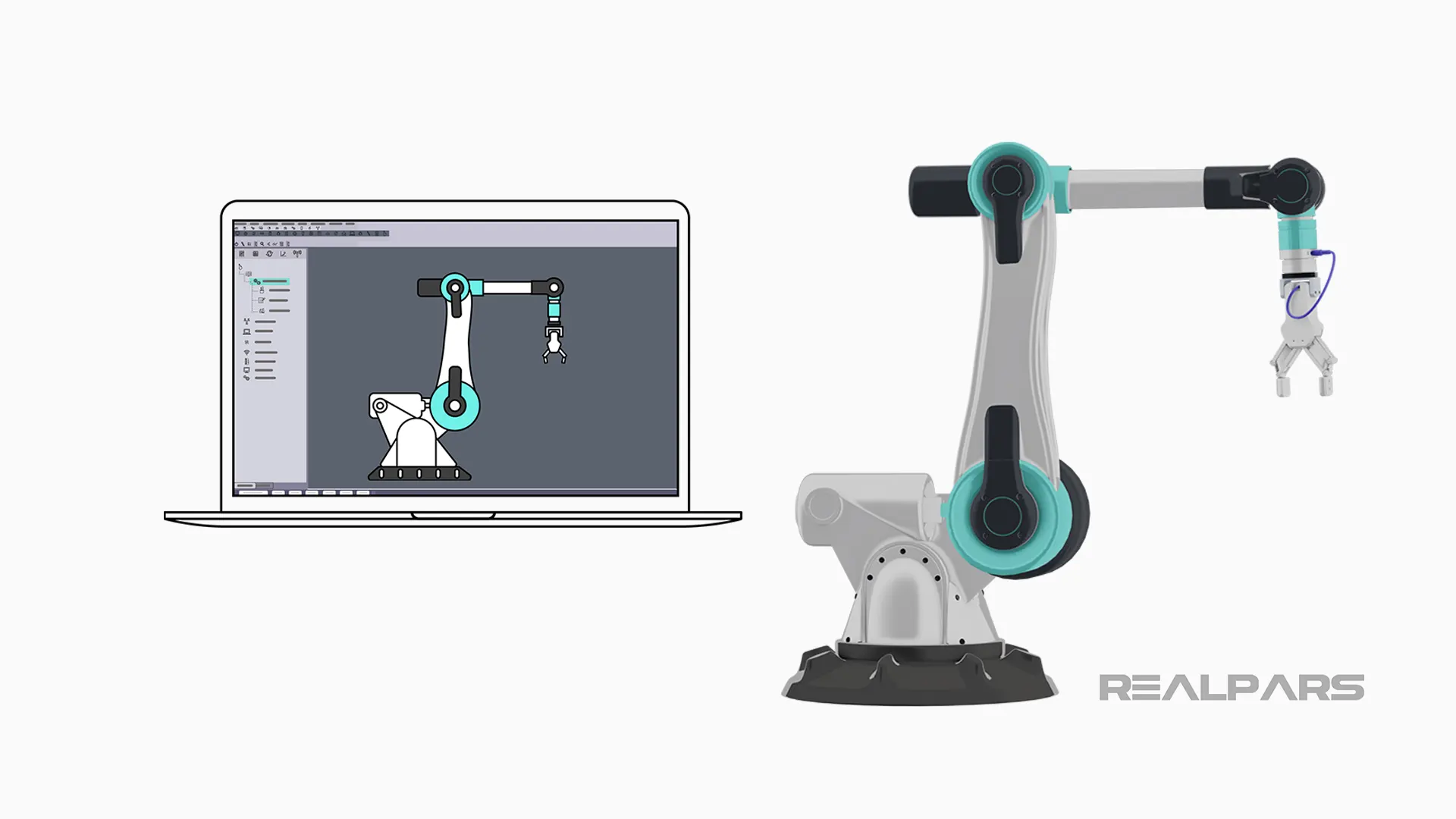
ابزارهای شبیه سازی ربات ۶ محوری معمولاً روی رایانه ای میزبانی می شوند که یک ربات واقعی را شبیه سازی می کند.
این رابط، که رابط کاربری گرافیکی (GUI) نامیده میشود، معمولاً از ترکیبی از کلیکها، حرکتهای ماوس و فشار دادن کلید استفاده میکند.

برخی نرم افزارهای شبیه سازی ۶ محوره حتی فایل های واقعی را از ربات واقعی کپی یا کپی می کنند.
نرمافزار شبیهسازی ربات ۶ محوره یک نمایش مجازی از ربات فیزیکی ایجاد میکند.
نرم افزار رابط کاربری گرافیکی بسته به سازنده می تواند در دو، سه یا چهار بعدی باشد.

.
محیطی که با استفاده از رابط کاربری گرافیکی ایجاد میشود به شما کمک میکند سلول روباتیک ۶ محوره را تجسم کنید.
توانایی دیدن ربات در محیط مجازی آن می تواند برای طراحان، برنامه نویسان و مهندسان ربات مفید باشد.

نرم افزار شبیه سازی ربات ۶ محوره را می توان برای اهداف بسیاری استفاده کرد.
یکی از چیزهایی که می توان از نرم افزار شبیه سازی رباتیک ۶ محوره برای آن استفاده کرد، اهداف مشخصه است.
این نرم افزار به شما کمک می کند تا انتخاب کنید کدام ربات برای این کار مناسب است.
با استفاده از نرم افزار شبیه سازی می توانید یک ربات را به صورت مجازی انتخاب کنید و ببینید که آیا با تجهیزات، ابزارها یا موانعی که بخشی از کار هستند مناسب است یا خیر.

.
وقتی ربات را انتخاب میکنید، گاهی اوقات کنترل مکان قرارگیری ربات را دارید و گاهی اوقات نمیتوانید.
هنگامی که میتوانید محل قرارگیری ربات در سلول را انتخاب کنید، میتوانید مکانی را انتخاب کنید که دور از موانع باشد.
به طور کلی، باید از موانع اجتناب کرد زیرا ممکن است باعث کاهش سرعت یک ربات ۶ محوره یا حتی برخورد با موانع در صورت بروز اشتباهات برنامهنویسی تصادفی شود.
زمانی که نمی توان از موانع اجتناب کرد، نرم افزار شبیه سازی ۶ محوری می تواند به چیدمان موانع و برنامه ریزی در اطراف آنها کمک کند.
به عنوان مثال، شما در حال طراحی یک سلول ربات با یک ربات با دو مکان انتخاب و مکان دو مکان هستید. در بین مکان های مکان، یک مانع وجود دارد که یک پرتو I است.
اگر ربات ۶ محوره مسیر مستقیم را در حین رفتن از محل انتخاب ۱ به مکان ۲ طی کند، به پرتو I برخورد می کند.

بهعنوان یک برنامهنویس ربات، میتوانید دنبالهای را از قبل برنامهریزی کنید تا ربات از محل انتخاب ۱ به مسیری برگردد که در آن ربات ۶ محوره هنگام تلاش برای رفتن به مکان ۲ به پرتو برخورد نکند.
از آنجایی که شما سلول ربات را با استفاده از یک ربات مجازی شبیه سازی کرده اید، می توانید I-beam را پیش بینی کرده و مطابق با آن برنامه ریزی کنید.

.
طراحی سلولهای ربات با استفاده از نرمافزار شبیهسازی میتواند به شما در انتخاب ربات ۶ محوره برای استفاده کمک کند.
مسافتی که ربات باید به آن برسد در هنگام انتخاب یک ربات ۶ محوره در طراحی مورد توجه قرار می گیرد تا اندازه مناسب آن کار باشد.

یکی دیگر از ملاحظات طراحی این است که ربات با چه سرعتی باید حرکت کند. پس از طراحی سلول ربات و برنامهریزی مسیر پرواز ربات، باید زمانبندی کنید که ربات با چه سرعتی یک چرخه کامل را انجام میدهد.
برخی نرمافزارهای شبیهسازی گزینهای دارند که به شما امکان میدهند چرخه را زمانبندی کنید و سپس زمان چرخه را ضبط کنید.
در حالی که زمان بندی چرخه مهم است، بودجه برای برخی از عوامل ایمنی نیز مهم است.
برای اندازه گیری خوب، عاقلانه است که از قانون ۵/۶ استفاده کنید. این بدان معنی است که شما باید زمان چرخه را با ربات که می تواند ۱/۶ سرعت اضافی داشته باشد ملاقات کنید.
استفاده از قانون ۵/۶ به شما کمک می کند ربات را طوری طراحی کنید که زمان چرخه را برآورده کند یا تعیین کنید که ربات انتخابی کار نخواهد کرد.
هر دو به شما این امکان را میدهند که بدون خرید چندین ربات تصمیم بگیرید که از چه رباتی استفاده کنید، که خرید آن میتواند هزینههای زیادی را متحمل شود.

.
برخی نرم افزارهای شبیه سازی به شما امکان می دهند انواع مختلفی از فایل های CAD را برای تعامل با سلول ربات خود وارد کنید.

این میتواند مفید باشد زیرا میتوانید فایلهایی را وارد کنید که ماشینهایی را که باید با ربات ۶ محوره تعامل داشته باشند، دوباره ایجاد میکنند، نه اینکه خودتان آن برنامهنویسی را ایجاد کنید.
این می تواند به ویژه هنگام تعامل با بسیاری از ماشین های پیچیده مفید باشد.
اکنون مزایای استفاده از نرم افزار شبیه سازی برای ربات ۶ محوره را شرح می دهیم.
نرمافزار شبیهسازی ۶ محوره میتواند به شما در تجسم سلول ربات در هنگام طراحی یا عیبیابی رباتهای ۶ محوره کمک کند.
همانطور که قبلاً توضیح داده شد، آزمایش و شبیهسازی یک سلول رباتیک میتواند بدون نیاز به خرید ربات فیزیکی برای آزمایش، ارزشی به فرآیند طراحی بیافزاید.
نرمافزار شبیهسازی میتواند برای بازتولید مشکلی که بازتولید آن در روبات واقعی ناخوشایند یا غیرممکن است، مفید باشد.
.
بازتولید مشکلات مشتری با استفاده از نرمافزار شبیهسازی میتواند به شما در یافتن راهحلی برای مشکل در زمانی که نمیتوانید از نظر فیزیکی در ربات باشید کمک کند…
همچنین، نرمافزار شبیهسازی بسیار ارزانتر از خرید ربات است، بنابراین حاشیه آزمون و خطا تا حدودی بیشتر است.
نرمافزار شبیهسازی میتواند در مواقعی که روباتی برای کار کردن ندارید و همچنان نیاز به برنامهنویسی پروژه دارید، کمک کند.
یک کلمه احتیاط: نرم افزار شبیه سازی می تواند مفید باشد، اما اگر مراقب نباشید، می تواند فرضیات نادرست ایجاد کند.
به عنوان مثال، اگر به همه ابعاد توجه نکنید و سلول خود را در ناحیه ای قرار دهید که کوچکتر از چیزی است که پیش بینی می کردید،
ممکن است باعث شود ربات بند بیاید و کندتر از پیش بینی شبیه سازی شما پیش برود.
گاهی اوقات شبیهسازی رباتهای ۶ محوری ممکن است زمان زیادی را صرف کند، به خصوص برای قرار دادن جزئیات کوچک در آن.
برای اینکه مطمئن شوید که از زمان خود به طور موثر استفاده می کنید، باید مراقب باشید که چقدر زمان صرف ساخت سلول مجازی خود در نرم افزار شبیه سازی ۶ محوره می کنید.
گاهی اوقات ایجاد یک سلول ساده با استفاده از نرم افزار شبیه سازی مقرون به صرفه نیست.
تعادل ظریفی بین مدت زمان صرف برای شبیه سازی یک ربات ۶ محوره وجود دارد که باید پس از مدتی تمرین با استفاده از نرم افزار یاد بگیرید.

یک دوست، مشتری یا همکار دارید که بتواند از برخی از این اطلاعات استفاده کند؟ لطفاً این مقاله را به اشتراک بگذارید.
در صورت هرگونه سوال و نظر با مجموعه پرگاران تماس حاصل فرمایید
جهت کسب اطلاعات بیشتر اینجا کلیک کنید.
مطالب مرتبط

انیمیشن کاری سوئیچ سطح شیب
تعریف سوئیچ سطح شیب :
سری سوئیچ های سطح شیب دار مانیتور، کنترل های سطح نقطه ای ...
پرگاران

روش کالیبراسیون سنسور پتانسیل اکسیداسیون
روش کالیبراسیون سنسور پتانسیل اکسیداسیون چگونه است؟
ORP مخفف Oxidation-Reduction Potential است. از نظر عملی، این یک اندازه ...
پرگاران

تفاوت شبکه های LAN و WAN
تفاوت شبکه های LAN و WAN چیست؟
دو نوع شبکه محبوب امروزه LAN (شبکه محلی) و WAN ...